
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рисунок 2 – Изменение цикловой подачи топлива в зависимости от времени испытания: №1 – 20 % СМ 80 % ДТ, загрязненное абразивом;
№ 2 – дизельное топливо, загрязненное абразивом
При работе на дизельном топливе за 75 ч стендовых испытаний подача топлива плунжерными парами на пусковых оборотах снизилась в среднем на 27 %, при работе на биотопливе этот же показатель изменился на 11 %. Таким образом, применение биотоплива позволяет на 16 % уменьшить износ плунжерных пар топливной аппаратуры.
Износостойкость при работе на биотопливе повышается за счет содержания большого количества олеиновой кислоты, способствующей образованию на поверхности деталей поверхностно активных веществ. Также и износ снижается, т. к. биотопливо имеет лучшие смазочные свойства, чем дизельное топливо, за счет существенного снижения содержания серы.
Библиографический список
1. Биотопливо для дизелей на основе сафлорового масла [Текст] / , , // Нива Поволжья. – 2009. – № 4 (13). – С. 71-74.
2. Возобновляемое растительное сырье [Текст] / Под общей редакцией Д. Шпаара.– Санкт-Петербург-Пушкин, 2006. – 382 с.
3. Загородских, масло вместо рапсового [Текст] / , , // Сельский механизатор. – 2010. – № 6. – С. 34-35.
4. Результаты испытаний и перспективы эксплуатации дизелей на биотопливе [Текст] /, , [и др.]. – М.: ФГНУ «Росинформагротех», 2008.– 136 с.
5. Уханов, биотопливо [Текст] / , , .– Пенза: РИО ПГСХА, 2008. – 229 с.
E-mail: *****@***ru
УДК 629.3.014.2.083.4
УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ УПРАВЛЕНИЯ
ГИДРОУВЕЛИЧИТЕЛЕМ СЦЕПНОГО ВЕСА ТРАКТОРА МТЗ-80
EQUATION OF DYNAMICS CONTROL SYSTEM HYDRO
MAGNIFIER COUPLING WEIGHT TRACTOR MTZ-80
, доктор технических наук
, кандидат технических наук
, кандидат технических наук
, кандидат технических наук
ФГОУ ВПО Волгоградская государственная сельскохозяйственная академия
A. G. Zhutov, V. I. Avramov, A. A. Karsakov, S. D. Fomin
Volgograd state agricultural academy
Установлена связь между входной величиной (моментом сопротивления двигателя) с переменной состояния, т. е. перемещением поршня регулятора автоматического управления гидроувеличителем сцепного веса трактора МТЗ-80.
The relationship between the input value (the moment of resistance of engine) with a state variable, the movement of the piston regulator automatic control gidrouvelichitelem coupling weight of MTZ-80.
Ключевые слова: трактор, гидроувеличитель сцепного веса, регулятор автоматического управления гидроувеличителем.
Key words: tractor, hitch gidrouvelichitel weight control automatic control gidrouvelichitelem.
Одним из эффективных средств повышения эксплуатационных показателей МТА является введение упругодемпфирующих звеньев в систему передачи энергии [2, 5, 6, 7]. Другим эффективным средством является использование гидродогружателя сцепного веса [1].
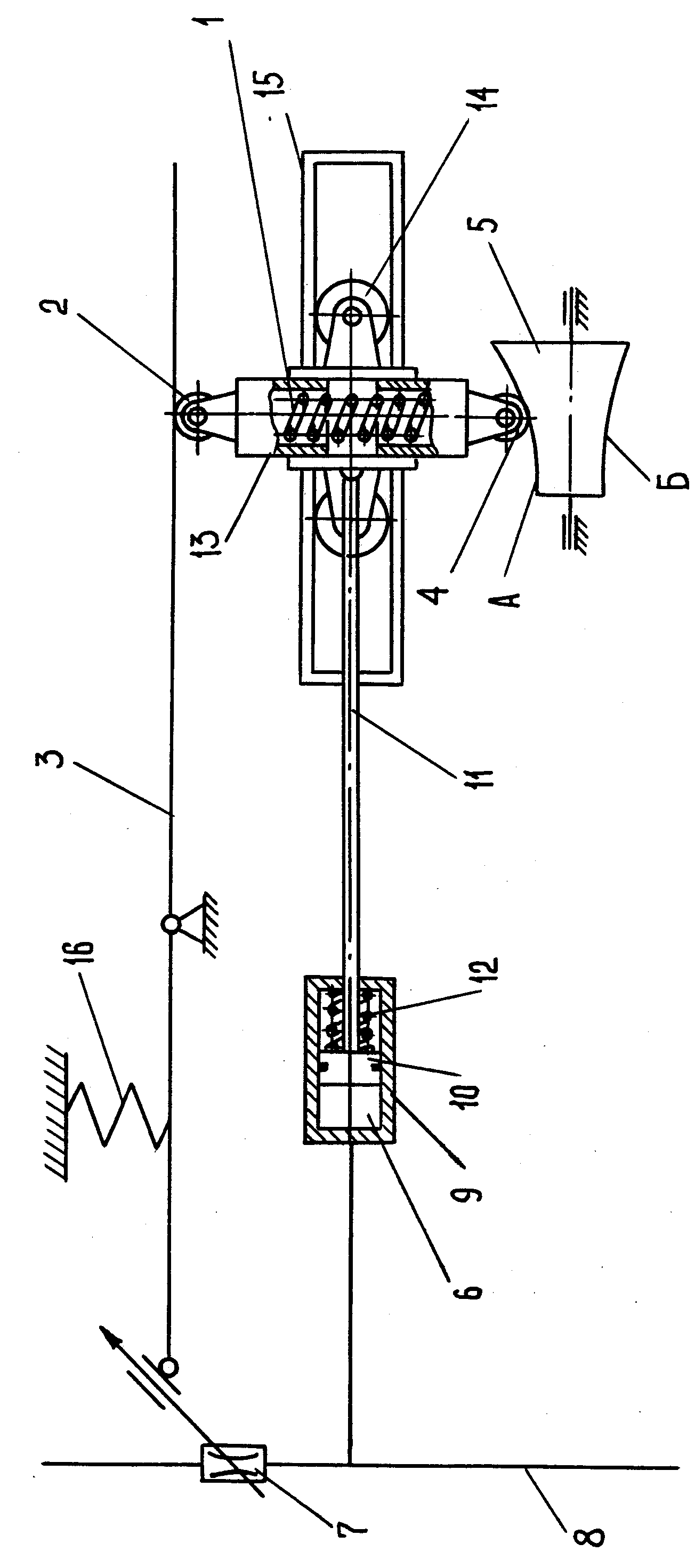
Рассмотрим систему дроссельного регулирования с пневмогидравлическим устройством для автоматического управления изменением сцепного веса трактора МТЗ-80 (рис. 1).
С целью обеспечения автоматического регулирования потока рабочей жидкости по заданному закону был разработан регулятор дросселирования потока жидкости в гидродемпфере конечной передачи транспортного средства (по А. С. СССР № 000). Общий вид регулятора представлен на рисунке 1. Регулятор имеет пружинное устройство 1, взаимодействующее посредством роликов 2 с двухплечим рычагом 3, роликов 4 – с копиром 5, имеющим опорные поверхности А и Б, преобразователь давления в линейные перемещения 6, регулируемый дроссель 7, установленный в магистрали 8, к которому также подключен преобразователь 6.
Преобразователь давления 6 в линейные перемещения выполнен в виде цилиндра 9, в котором установлен поршень 10, который посредством тяги 11 соединен с пружинным устройством 1, причем поршневая полость преобразователя 6 соединена с магистралью 8, а в штоковой полости установлен упругий элемент 12.
Для устранения возможности перекосов и заклинивания пружинного устройства 1 на его корпусе 13 установлены два ролика 14, взаимодействующих с направляющей 15. Регулируемый дроссель 7, посредством упругого элемента 16 установлен на начальное проходное сечение.
Уравнение динамики при наличии пневмогидроаккумулятора является нелинейным. В результате линеаризации исходные нелинейные уравнения заменяются приближенными линейными.
Предположим, что изменение тягового сопротивления плуга – это внешнее воздействие u, а выходная величина у – изменение давления в гидросистеме за счет дроссельного регулирования (рис. 1).
Эти величины будут связаны нелинейным уравнением
![]() . (1)
. (1)
Незначительные отклонения входных и выходных величин от значений u0 и у0 обозначим соответственно u' и у'.
При этих условиях в каждый момент времени
u = uo + u'; у = уо + у'.
Значения u0 и у0 могут быть функциями времени.
Предлагаемый регулятор дросселирования потока жидкости состоит из нерегулируемого сечения (трубопровода 8) (рис. 1) с гидравлическим сопротивлением R1 и регулируемого дроссельного элемента с переменным гидравлическим сопротивлением R2 и гидроцилиндра 9 с поршнем 10 (массой m). На поршень с одной стороны действует давление Р2 жидкости, а с другой – пружина 12 с жесткостью Спр. Поршень находится в равновесии, когда сила давления равна силе пружины.
В зависимости от момента сопротивления меняется проходное сечение дросселя 7 и изменяется давление Р2. В этом случае входной величиной является величина сопротивления R2, а выходной – перемещение поршня уп.
Введем обозначения расхода жидкости:
Q1 – расход жидкости через трубопровод 8 (нерегулируемое сечение);
Q2 – расход жидкости через регулируемый дроссель 7 и Q3 – расход жидкости в над поршневое пространство 6.
При этих условиях будем иметь:
Q1=Q2 + Q3. (2)
Из условия неразрывности течения без учета сжимаемости жидкости запишем
![]() , (3)
, (3)
где Fц – рабочая площадь цилиндра, равная площади поршня.
Пренебрегая трением поршня о стенки гидроцилиндра и на основании второго закона Ньютона, уравнение движения поршня запишем в следующем виде:
![]() , (4)
, (4)
где Ро – сила от действия пружины при уп = 0.
Система уравнений (2-4) является нелинейной.
Для линеаризации уравнений будем рассматривать малые отклонения у?п, Р'2 и R'2 переменных уп, Р2 и R2 относительно тех установившихся значений, которые они принимают при уп = упо.
Обозначим эти малые значения Р2.0 и R2.0. Тогда будем иметь
уп = упо +у?п; Р2 = Р2.0 + Р?2; R2 = R2.0 + R?2.0. (5)
На основании выражений (2-5) получим
![]()
![]() , (6)
, (6)
где Q1.0 и Q2.0– соответственно расходы жидкости через трубопровод 8 и дроссель 7.
Уравнение (4) при малых отклонениях переменных величин принимает вид:
![]() .
.
При равновесии поршня 10 в гидроцилиндре регулятора
FцР2.0 – (Р0 + Спрупо) = 0,
тогда
![]() . (7)
. (7)
Исключая из уравнений (6) и (7) переменную Р?2, получим линеаризованное уравнение рассматриваемой системы:
![]() , (8)
, (8)
где а1=Fц;
![]()
![]() .
.
Разделим все эти коэффициенты на а0 и приведем уравнение (8) к стандартному виду:
![]() ,
,
где ![]() .
.
 ; (9)
; (9)
![]() .
.
Входящие в уравнение (9) коэффициенты Т2 и Т1 являются постоянными времени, а коэффициент К в данном случае будет коэффициентом передачи (преобразования). В уравнении (9) можно перейти к безразмерным переменным. Примем в качестве базовых величин упо и R2.0 и введем обозначения:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
