
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]()
![]() .
.
Результат решения уравнений (3):
![]() (4)
(4)
Из (4) следует, что координаты «вершины» С являются функциями длины l1 и l2 цилиндров; в u и U, которые записываются громоздкими выражениями и здесь не приводятся, также входят l1 и l2.
Решение (4) проверяется на соблюдение условия U > 0 при различных сочетаниях длины цилиндров. Если размеры механизма и положения его шарниров выбраны неудачно (ввиду неочевидности задачи) и при l1 = lmin, l2 = lmax (или наоборот) U ? 0, то пространственный механизм попадает в мертвое положение, что недопустимо. Соблюдение U > 0 (с определенным запасом) – это и есть условие существования этого специфического механизма.
Теоремы 1 и 2 используются в сочетании с преобразованиями систем координат. При кинематическом анализе манипулятора необходимо определить обобщенные координаты геометрического характера, которые выражаются углами поворота ведомых звеньев. Для пространственного механизма это углы ? и ? поворота коренной секции – ее прямой ОС в вертикальной и горизонтальной плоскостях (рис. 1), которые определяются при переходе от прямоугольной к сферической системе координат:
![]()
![]()
![]()
![]() . (5)
. (5)
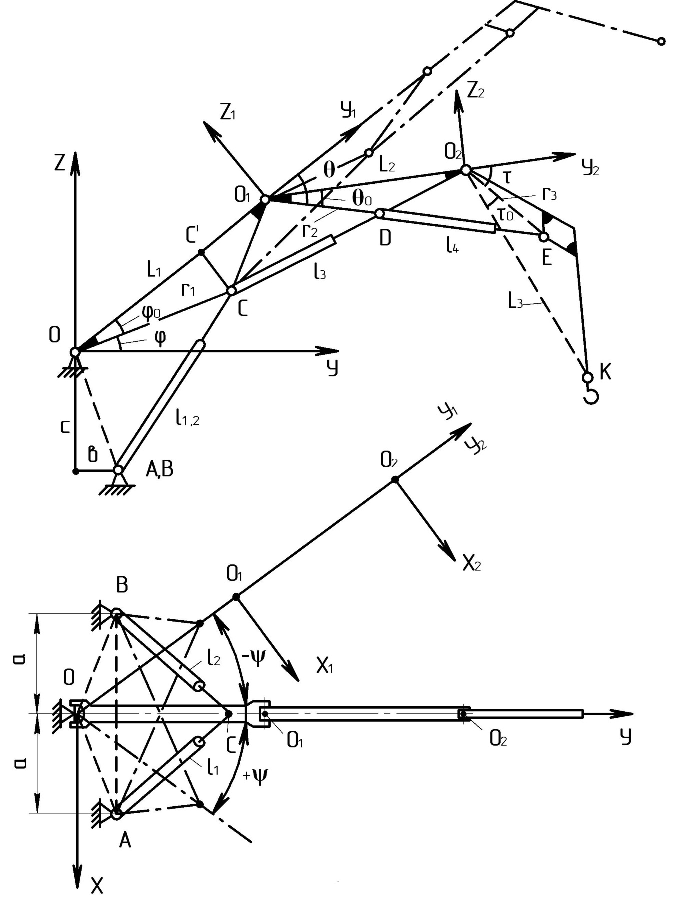
Рисунок 1
Возвратившись к базовой системе координат Оxyz, находим координаты точки О1 – конца коренной секции и начала новой системы координат Оy1z1:
![]()
![]()
![]()
![]() (6)
(6)
где L1 = OO1; ![]()
![]() OC,
OC,![]()
![]() OO1 .
OO1 .
Углы ? и ? поворота последующих звеньев стрелы определяются в своих – плоских системах координат – с использованием теоремы 1. Координаты точки С в системе
![]()
![]() .
.
При определении координат вершины D треугольника O1DO2 система уравнений (1) принимает вид:
![]()
![]() (7)
(7)
![]()
![]()
Отсюда определяются ![]()
![]() , а третью обобщенную координату находим при переходе к цилиндрической системе координат:
, а третью обобщенную координату находим при переходе к цилиндрической системе координат:
![]()
![]() (8)
(8)
Подобным образом в своей системе координат О2y2z2 определяется четвертая обобщенная координата – угол ? поворота концевой секции (рис. 1). Возвратившись к базовой (неподвижной) системе отсчета Оxyz и используя известные формулы преобразования систем координат, находим положение точки К – оголовка манипулятора, несущего грузозахватный орган,
![]()
![]()
![]()
![]() (9)
(9)
![]()
![]()
где ?* = ? + ?0 ; ?* = ? + ?0 – ? + ?0 ; ?* = ? + ?0 – ? + ?0 – ? – ?0 ;
L2 = O1O2; L3 = O2K; ![]()
![]() O1O2;
O1O2; ![]()
![]() О2К,
О2К,![]()
![]() О2К (рис. 1).
О2К (рис. 1).
Координаты (9) являются функциями всех четырех обобщенных координат, которые, в свою очередь, через координаты узловых точек C, D, E являются функциями длины гидроцилиндров l1…l4. При изменении длины последних оголовок К совершает сложное пространственное движение, а при всех сочетаниях ln, min и ln, max (n = 1…4) образуется объемная зона действия манипулятора – его кинематические возможности. Это способствует также созданию систем управления манипуляторами [1].![]()
![]()
Полученные значения координат узловых точек и обобщенных координат используются при силовом анализе и динамическом исследовании манипуляторов. Пространственная система сил, действующих на исследуемый манипулятор (рис. 2), включает: внешние силы – вес груза Q и секций стрелы G1, G2,G3; искомые силы – усилия в штоках гидроцилиндров F1…F4, составляющие реакции R в опорном шарнире О, момент в этом шарнире (показан вектор-момент ![]()
![]() 0).
0).
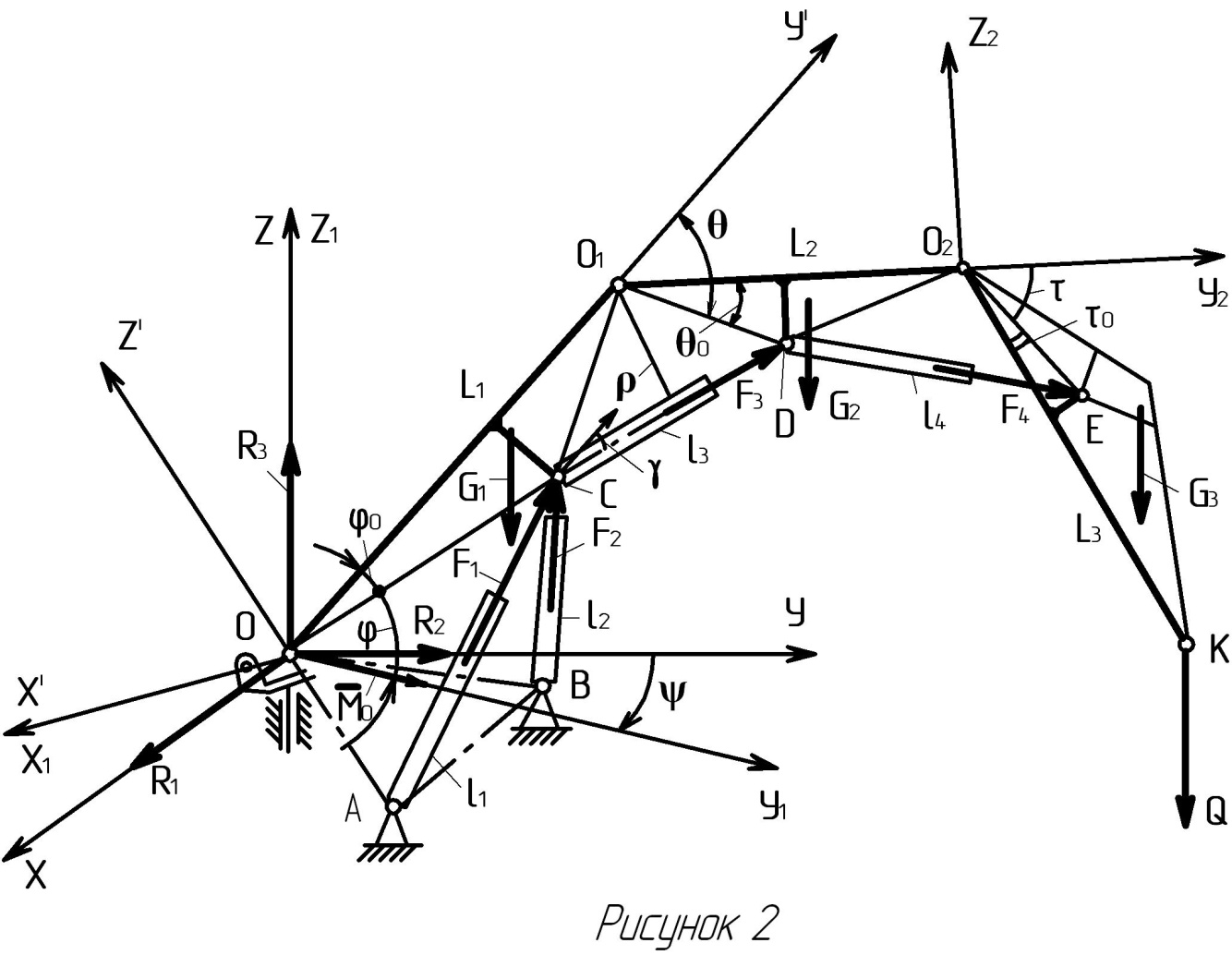
Рисунок 2
Для примера представим начало решения – систему уравнений с учетом сил, действующих на коренную секцию и ее гидроцилиндры,
m11F1 + m12F2 + R1 = 0;
m21F1 + m22F2 + R2 = 0;
m31F1 + m32F2 + R3 = Q + G;
m41F1 + m42F2 + m43M0 = Q·yK – Gy; (10)
m51F1 + m52F2 + m53M0 = Q·xK + Gx;
m61F1 + m62F2 = 0,
где G – приведенный вес всей стрелы; (x, y) – текущие координаты точки приложения этого веса; mij (i=1,2,3; j=1,2), mKq (k=4,5; q=1,2,3), m61, m62 – коэффициенты и направляющие косинусы при силах F1,F2 и частично при моменте М0 (определяются своими зависимостями).
После решения системы уравнений (10) получим искомые силы и момент как функции текущих значений длины цилиндров l1, l2, координат узловых точек и обобщенных координат ? и ?. Далее рассматриваются следующие секции стрелы в своих плоских системах координат (рис. 2), со своими обобщенными координатами и определяются усилия в цилиндрах F3,F4 и реакции в опорах О1 и О2.
Таким образом, предложенные теоремы аналитической геометрии в сочетании с преобразованием систем координат позволяет решать широкий круг задач при конструировании и исследовании шарнирнo-стержневых манипуляторов с пространственным и плоскими механизмами.
Библиографический список
1. Герасун, управления манипуляторами на основе пространственных исполнительных механизмов [Текст] / , // Мехатроника, автоматизация, управление. – 2010. – № 2. – С. 24-28.
2. Пындак, кинематического и силового анализа шарнирно-стержневых манипуляторов [Текст] / , , // Справочник. Инженерный журнал. – 2010. – № 4. – С. 31-34.
3. Пындак, В, И. Кинематический и силовой анализ гидроманипуляторов с пространственным приводным механизмом [Текст] / , // Справочник. Инженерный журнал. – 2002. – № 6. – С. 30-33.
E-mail: *****@***ru
УДК 631.354.2
ПОВЫШЕНИЕ ПРОПУСКНОЙ СПОСОБНОСТИ
ДОМОЛАЧИВАЮЩЕГО УСТРОЙСТВА КОЛОСОВОГО
ВОРОХА КОМБАЙНА ДОН-1500Б
COMBINE DON-1500B HEAP TAILINGS FINISH THRESHING UNIT BRANDWIDTH INCREASE
, доктор сельскохозяйственных наук, профессор
, кандидат технических наук, доцент
, аспирант
ФГОУ ВПО Волгоградская государственная сельскохозяйственная академия
А. A. Ryadnov, S. V. Tronev, A. P. Stenkovoy
Volgograd state agricultural academy
Предложены изменения конструкции домолачивающего устройства колосового вороха комбайна Дон-1500Б, состоящие в усовершенствовании противорежущей пластины и установке вариатора регулирования частоты вращения вала домолачивающего устройства, позволяющие повысить его пропускную способность. Даны некоторые результаты экспериментальных исследований комбайна Дон-1500Б с измененной конструкцией домолачивающего устройства колосового вороха.
Combine Don-1500B heap tailings finish threshing unit construction modifications comprising anticuttung plate modification and finish threshing unit axle rotating frequency regulation variator installation allowing to increase its brandwidth are suggested in the article. Some results of combine Don-1500B with modified heap tailings finish threshing unit construction experimental researches are given here.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
