
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Наибольшее распространение имеют задачи Коши, в которых (заданы начальные условия: при х =х0 , у(х0) = у0. Имея их, легко начинать процесс решения, т. е. найти ![]() при
при ![]() , y2 — при х2 и т. д. Задачи другого типа — краевые задачи (например, с конечными условиями или с условиями в промежуточной точке) - решаются специальными приемами, в том числе нередко сведением к другим эквивалентным задачам с начальными условиями.
, y2 — при х2 и т. д. Задачи другого типа — краевые задачи (например, с конечными условиями или с условиями в промежуточной точке) - решаются специальными приемами, в том числе нередко сведением к другим эквивалентным задачам с начальными условиями.
Выделяют два класса методов решения: одношаговые и многошаговые. Первый класс методов требует для нахождения следующего значения функции только одной текущей точки, т. е. ![]() = F[f(
= F[f(![]() )], а второй — нескольких, например,
)], а второй — нескольких, например, ![]() = F(
= F(![]() ).
).
К недостаткам многошаговых методов относится невозможность изменения в процессе решения величины шага (так как они используют предыдущие точки с ранее применяемым шагом, а учет меняющегося шага очень сложен и громоздок), что бывает необходимо для повышения эффективности метода. Заметим, что величина шага существенно влияет на точность и скорость решения, поэтому изменение ее в процессе решения—увеличение при медленно изменяющемся решении и уменьшение при быстро изменяющемся — очень важно для эффективности решения. К достоинствам многошаговых методов относят в основном меньший объем памяти компьютера, требующейся для реализации, и возможность теоретической оценки погрешности решения. Представителем класса многошаговых методов являются методы прогноза и коррекции. К классу одношаговых методов относятся методы Эйлера, Рунге — Кутта и др.
Основная идея получения простейших вычислительных алгоритмов в одношаговых методах сводится к разложению искомого решения у(х) в ряд Тейлора в окрестности текущей точки и усечения его. Количество оставленных членов ряда определяет порядок и, следовательно, точность метода. По полученному разложению, зная значение у в точке разложения yi и производную f( ), находят значение функции у через шаг h: ![]() =
=  . Если в разложении удерживается большее число членов, то необходимо рассчитывать f( ) в нескольких точках (таким способом избегают необходимости прямого вычисления высших производных, присутствующих в разложении в ряд Тейлора). Расчетные алгоритмы многошаговых методов базируются на построении интерполяционных или аппроксимирующих функций, от которых берется интеграл.
. Если в разложении удерживается большее число членов, то необходимо рассчитывать f( ) в нескольких точках (таким способом избегают необходимости прямого вычисления высших производных, присутствующих в разложении в ряд Тейлора). Расчетные алгоритмы многошаговых методов базируются на построении интерполяционных или аппроксимирующих функций, от которых берется интеграл.
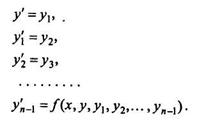
Численными методами решаются не только отдельные уравнения, но и системы уравнений (чаще всего первого порядка), причем большинство методов решения одного уравнения легко распространяются на решение систем. Дифференциальные уравнения высших порядков вида
![]() решаются в основном сведением к системе уравнений первого порядка путем замены переменных: у1 = у', у2 = у", у3=
решаются в основном сведением к системе уравнений первого порядка путем замены переменных: у1 = у', у2 = у", у3=![]() и т. д. При этом дифференциальное уравнение n-го порядка заменяется системой из п уравнений:
и т. д. При этом дифференциальное уравнение n-го порядка заменяется системой из п уравнений:
Метод Эйлера.
В основе метода Эйлера лежит идея графического построения решения дифференциального уравнения. Однако этот метод дает одновременно и способ нахождения искомой функции в табличной форме.
Пусть дано дифференциальное уравнение y'=f(x, y) (1). Найти приближенное численное решение этого дифференциального уравнения, т. е. составить таблицу приближенных значений функции у=у(х) удовлетворяющей заданным начальным условиям.
x | x0 | x1 | x2 | x3 | x4 | x5 | … | xn |
y | y0 | y1 | y2 | y3 | y4 | y5 | … | yn |
Где, xi=x0+i×h, ![]() – шаг таблицы.
– шаг таблицы.
Приближенно можно считать, что правая часть в (1) остается постоянной на каждом из отрезков между точками деления. Метод Эйлера состоит в непосредственной замене производной разностными отношениями по приближенной формуле:
![]()
y-y0=f(x0,y0)×(x-x0)
y=y0 + f(x0,y0)×(x-x0)
если x=x1, то y1=y0+f(x0,y0)×(x1-x0), y1=y0+h×f(x0,y0), Dy0=h×f(x0,y0)
если x=x2, то y2=y1+f(x1,y1)×(x2-x1), y2=y1+h×f(x1,y1), Dy1=h×f(x1,y1)
…
если x=xi+1, то yi+1=yi+h×f(xi, yi), Dyi=h×f(xi, yi)
Таким образом, получение таблицы значений искомой функции у(х) по методу Эйлера заключается в циклическом применении пары формул:
Dyk=h×f(xk, yk), yk+1=yk+Dyk, где k=0, 1, 2, … ,n
Геометрически эти формулы означают, что на отрезке [xi, xi+1] интегральная кривая заменяется отрезком касательной к кривой (см. рис. 1, рис. 2).
Метод Рунге-Кутта.
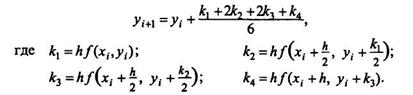
Существует целая группа методов Рунге — Кутта (в последние годы начинает в литературе появляться "русский" вариант произношения фамилий авторов метода, в соответствии с которым название звучит как метод Рунге — Купы), среди которых наибольшее распространение получил метод четвертого порядка. Следовательно, он более точен, чем метод Эйлера, который является методом первого порядка. Для расчета одного значения функции необходимо четыре раза вычислять правую часть дифференциального уравнения, а не два, как в модифицированном методе Эйлера второго порядка. Вычислительный алгоритм записывается следующим образом:
Здесь также для контроля точности можно применять прием двойного просчета.
Метод Милна.
Метод Милна относится к многошаговым методам и представляет один из методов прогноза и коррекции. Решение в следующей точке находится в два этапа. На первом этапе осуществляется по специальной формуле прогноз значения функции, а затем на втором этапе — коррекция полученного значения. Если полученное значение у после коррекции существенно отличается от спрогнозированного, то проводят еще один этап коррекции. Если опять имеет место существенное отличие от предыдущего значения (т. е. от предыдущей коррекции), то проводят еще одну коррекцию и т. д. Однако очень часто ограничиваются одним этапом коррекции.
Метод Милна имеет следующие вычислительные формулы:
• этап прогноза:
![]()
де для компактности записи использовано следующее обозначение ![]() f( );
f( );
• этап коррекции:
![]()
Абсолютная погрешность определяется по формуле ![]()
![]() |/29.
|/29.
Метод требует несколько меньшего количества вычислений (например, достаточно только два раза вычислить f(x,y), остальные запомнены с предыдущих этапов), но требует дополнительного "расхода" памяти. Кроме этого, как уже указывалось выше, невозможно "запустить" метод: для этого необходимо предварительно получить одношаговыми методами первые три точки.
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Линейное программирование — наука о методах исследования и отыскания экстремальных (наибольших и наименьших) значений линейной функции, на неизвестные которой наложены линейные ограничения.
Эта линейная функция называется целевой, а ограничения, которые математически записываются в виде уравнений или неравенств, называются системой ограничений.
Определение. Математическое выражение целевой функции и ее ограничений называется математической моделью экономической задачи.
В общем виде математическая модель задачи линейного программирования (ЛП) записывается как
![]() Z(x)=C1X1+C2X2 + . . . +СJXJ + . . . +СnXn _ max(min)
Z(x)=C1X1+C2X2 + . . . +СJXJ + . . . +СnXn _ max(min)
при ограничениях:
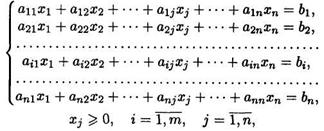
где Xi — неизвестные;a ij, bj, Ci — заданные постоянные величины.
Все или некоторые уравнения системы ограничений могут быть записаны в виде неравенств.
Математическая модель в более краткой записи имеет вид
![]() Z(x) = ∑Ci Xi max(min)
Z(x) = ∑Ci Xi max(min)
при ограничениях:

Определение Допустимым решением (планом) задачи линейного программирования называется вектор X = (х1, х2, ,...хn, ) , удовлетворяющий системе ограничений. Множество допустимых решений образует область допустимых решений (ОДР).
Определение Допустимое решение, при котором целевая функция достигает своего экстремального значения, называется оптимальным решением задачи линейного программирования и обозначается Хопт.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
