
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тоді

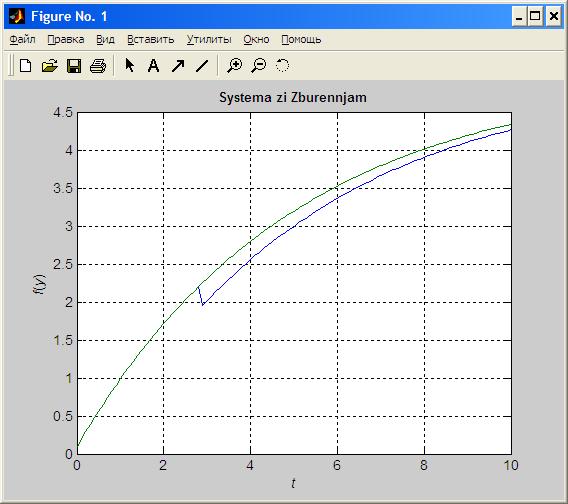
Видно, що при тому, що корінь характеристичного поліному менше 0, система при збурені повертається до своєї цілі. Тобто, є стійкою.
Що таке стійкість?
Стійкість роботи системи управління
Розглянути спочатку комплексну площину і властивості синусоїдального вхідного сигналу.
Раніше, ми визначали СУ як з’єднання окремих ланок управління в певну конфігурацію, яка забезпечує отримання бажаної реакції систему на бажаний вхідний вплив.
Наприклад, отримання завжди прибутку на наперед розрахованому максимальному рівні при введенні в систему певної кількості ресурсів виробництва.
Для цього система має бути стійкою. Стійка система – це динамічна система, яка має обмежену реакцію на обмежений вхідний сигнал відхилення від розрахованого (бажаного):
![]() .,
.,
де ![]() - оптимальні задані (розрахункова ні) значення вихідних та вхідних сигналів.
- оптимальні задані (розрахункова ні) значення вихідних та вхідних сигналів.
Тобто, якщо система підлягає впливу обмеженого вхідного сигналу, тоді вона має і обмежений вихідний сигнал.
Поняття стійкості можна проілюструвати положенням кульки в ямі. Це положення стійке і є реакцією системи. Якщо кулька (тобто) реакція системи відхилення певним збуренням від стійкого, то вона
- повернеться через деякий час в положення рівноваги (асимптотична стійкість)
- буде завжди на обмеженій відстані від рівноваги (проста стійкість)
- буде з часом все далі відхилятися від бажаного (рівноважного) значення – нестійкість.
Тобто, реакція системи на відхилення (збурення) початкових умов або траєкторії буде з часом або затухати, або нейтральною, або нарастати.
Всі СУ, які синтезуються, мають бути стійкими. Тобто, реакція системи на збурення початкового сигналу або збурення, які були по ходи її роботи має бути обмеженою, а можливо при цьому і прямувати до 0.
Одним з найважливіших властивостей фазових траєкторій динамічних систем є наявність в них стаціонарних станів ![]() Тому в якісному аналізу в першу чергу вивчають властивості стаціонарних точок! Такий стаціонарний стан називають стаціонарною точкою (СТ) в фазовому просторі. При проходжені траєкторії системи через цю точку, вона (траєкторія) самостійно вже не може з неї «вийти», тобто система не може змінити свій стан.
Тому в якісному аналізу в першу чергу вивчають властивості стаціонарних точок! Такий стаціонарний стан називають стаціонарною точкою (СТ) в фазовому просторі. При проходжені траєкторії системи через цю точку, вона (траєкторія) самостійно вже не може з неї «вийти», тобто система не може змінити свій стан.
Тому, при якісному аналізі динамічної системи визначають наступні її характеристики:
- чи існують в системі стаціонарні стани;
- скільки стаціонарних станів;
- перевірка стійкості всіх стаціонарних станів;
- знаходження залежності характеру стійкості СТ від параметрів системи;
- чи можливі переходи системи з однієї СТ до іншої?
По визначенню стаціонарний стан системи є такий стан, коли всі похідні по часу дорівнюють нулю:
![]()
Значення полюсів (коренів характеристичного рівняння) лінійної СУ з постійними параметрами показує стан стійкості системи управління.
Необхідною і достатньою умовою стійкості замкненої лінійної або лінеарізованої системи управління є умова, аби всі полюси ПФ системи мали від’ємну дійсну частину.
Тобто, нехай передавальна функція системи має вигляд:

Реакція такої системи на імпульсний вхідний сигнал, або на сигнал ![]() народжує перехідну траєкторію, яку можна представити як
народжує перехідну траєкторію, яку можна представити як
 .
.
Тоді, видно, що умовою (критерієм) стійкості системи може служити умова відсутності у полюсах передавальної функції додатніх дійсних частин.
Якщо ж ми маємо дискретну (квантовану) систему, то можна визначити аналог даного критерію стійкості. Цей критерій промовляє, що замкнена СУ стійка, якщо корені – полюси ПФ «лежать» в лівій половині p-площини. Тому що відомо, що для дискретних систем при z-перетворенні має місце відношення  . Отже, можна записати, що
. Отже, можна записати, що ![]() , якщо
, якщо ![]() . Звідки слідує, що критерій стійкості промовляє, що всі полюси ПФ мають «лежати» в межах одиничного кола на z-площині.
. Звідки слідує, що критерій стійкості промовляє, що всі полюси ПФ мають «лежати» в межах одиничного кола на z-площині.
Характеристичний поліном
![]()
можна переписати у вигляді
![]()
або ,
,
де ![]() - корені поліному.
- корені поліному.
Відомо, що для стійкої системи всі корені мають мати один знак – від’ємний для дійної частини. А отже, видно, що всі коефіцієнти ХП мають один знак. Але це лише необхідна умова, як і умова, що всі коефіцієнти відмінні від 0.
Наприклад, ХП має вигляд
![]()
характеризує нестійку систему.
Відомо при умові, що поліном має вигляд:
![]() ,
,
де
![]() - це сума всіх добутків коренів, взятих по
- це сума всіх добутків коренів, взятих по ![]() зі знаком
зі знаком ![]() .
.
Наприклад, поліном другого або третього порядку.
Критерій Рауса-Гурвіца дає необхідну і достатню умову стійкості для лінійних систем. Спочатку будується таблиця Рауса:
де
 і так далі.
і так далі.
Визначник у виразі для ![]() -того коефіцієнта, починаючи з третього рядка, формується з першого та
-того коефіцієнта, починаючи з третього рядка, формується з першого та ![]() -го стовпчиків двух попередніх рядків.
-го стовпчиків двух попередніх рядків.
Критерій Рауса-Гурвіца. Число коренів характеристичного поліному з позитивною дійсною частиною рівно числу змін знаку в першому стовпчику таблиці Рауса.
Необхідно розглянути чотири різні випадки:
1)в першому стовпчику немає жодного нульового елемента
2)в першому стовпчику є 0-й елемент, але деякі інші елементи рядка, яка містить 0 в першому стовпчику, відмінні від 0.
3)В першому стовпчику є 0-й елемент і всі решта елементів рядка – 0
4)Той же випадок, що і 3), але ХР має кратні корені на уявній вісі.
Випадок 1. В першому стовпчику немає жодного нульового елемента
Приклад. Система другого порядку ![]() . Перший стовпчик:
. Перший стовпчик:
 .
.

Отже, щоб система була стійкою потрібно, щоб всі коефіцієнти були одного знаку.
Приклад. Система третього порядку ![]() . Таблиця Рауса.
. Таблиця Рауса.
 ,
,
де  .
.
Отже, умова перетворюється на ту, щоб всі коефіцієнти ХР були додатні і виконувалась умова:  .
.
При ![]() маємо випадок 3.
маємо випадок 3.
Антиприклад:
 - всі полінома коефіцієнти додатні. Але
- всі полінома коефіцієнти додатні. Але
 .
.
Отже, система нестійка!
Випадок 2. В першому стовпчику є 0-й елемент, але деякі інші елементи цього відповідного рядка не 0!
Потрібно цей елемент, який дорівнює 0, замінити на мале число ![]() , яке після побудови ТР спрямувати до 0.
, яке після побудови ТР спрямувати до 0.
Наприклад,
![]() .
.
Таблиця Рауса має тоді вигляд
![]() ,
, ![]() .
.
Система є нестійкою, бо ![]() , отже в першому стовпчику ТР відбувається зміна знаку 2 рази, тобто, два полюси ПФ знаходяться в правій навів площині.
, отже в першому стовпчику ТР відбувається зміна знаку 2 рази, тобто, два полюси ПФ знаходяться в правій навів площині.
Випадок 3. В першому стовпчику є 0-й елемент і всі інші елементи рядка – 0!
Таке можливо, коли корені ХП розміщені симетрично навколо початку координат s-площині, наприклад, ХП має співмножник ![]() або
або ![]()
В цьому випадку слід використати допоміжний поліном ![]() , який складається з елементів рядка, який передує нульовому. Порядок допоміжного поліному є парним і рівний кількістю симетричних коренів.
, який складається з елементів рядка, який передує нульовому. Порядок допоміжного поліному є парним і рівний кількістю симетричних коренів.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
