
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Особливу роль при цьому грають рекурентні алгоритми, наприклад, рекурентний метод найменших квадратів.
Методи експериментального визначення динамічних характеристик об’єкта управління
Сьогодні широко використовуються достатньо прості лінійні моделі промислових об’єктів управління. Окремо виділяються інерційні ланки (функціональні блоки) першого чи другого порядку з запізненням для розрахунку настроювань регуляторів, які забезпечують якісну роботу реальної системи управління. В зв’язку з цим виникає задача визначення кількісних характеристик (параметрів) математичних моделей промислових систем управління. Ці параметри можна визначати за допомогою експериментів на реальному ОУ.
Розглядаємо наступні види передаточної функції ОУ:
- ПФ інерційної ланки першого порядку 
де ![]() - відповідно, коефіцієнт підсилення, постійна часу і запізнення, які мають бути визначенні. Для ОУ без самовирівнювання ПФ має вигляд
- відповідно, коефіцієнт підсилення, постійна часу і запізнення, які мають бути визначенні. Для ОУ без самовирівнювання ПФ має вигляд
- Більш точно динаміку об’єкта описує модель другого порядку з запізненням
Експериментальні методи визначення характеристик ОУ діляться на два класи:
1. Методи визначення часових характеристик ОУ
2. Методи визначення частотних характеристик ОУ
Часові методи визначення динамічних характеристик поділяються, в свою чергу, на активні і пасивні.
Активні методи базуються на визначених вхідних тестових сигналів, якими є
- регулярні функції часу (крокові функції, прямокутні імпульси, гармонічні сигнали, періодичні двійкові сигнали);
- пробні сигнали випадкового характеру.
В залежності від виду пробного сигналу обираються відповідні методи обробки вихідного сигналу ОУ. Так, наприклад, при подачі крокового керуючого сигналу, знімають криву розгону об’єкта, а при подачі прямокутного імпульсного сигналу знімають криву відклику. Крива відклику знімається для об’єктів, які не допускають подачу на вхід об’єкта крокових сигналів.
Перевагами активних методів є
- достатньо викока точність отримання математичного опису;
- відносно мала тривалість експериментів.
Але активні методи можуть приводити до порушення нормального перетікання технологічного процесу. Тому проведення експериментів має бути ретельно спланованим.
В пасивних методах на вхід об’єкта не подаються ніякі пробні сигнали, а лише фіксуються природні рухи об’єкта в процесі його нормального функціонування. Отримані реалізації масивів даних вхідних і вихідних сигналів оброблюються статистичними методами. За результатами обробки отримують параметри передаточної функції об’єкта. Однак, такі методи мають ряд недоліків:
- мала точність отриманого математичного опису, (тобто відхилення від нормального режиму роботи малі);
- необхідність накоплення великих масивів даних з ціллю підвищення точності (тисячі точок);
- якщо експеримент проводиться на об’єкті з системою регулювання, тоді спостерігається ефект кореляції (взаємозв’язку) між вхідними і вихідними сигналами об’єкта через регулятор. Такий взаємозв’язок знижує точність математичного опису
Параметрична ідентифікація методом найменших квадратів.
Багатовіковий досвід людства виражається принципом максимальної вірогідності (ПМВ):
На практиці частіше відбуваються ті події, які мають максимальні ймовірності!
Тобто, якщо припустити, що є статистика спостережень за значенням вихідної змінної ![]() у відповідь на вхідний сигнал
у відповідь на вхідний сигнал ![]() у вигляді таблиці, тоді ті значення, що реалізувалися є такі, що мають максимальну імовірність. При тому, що ці події є незалежними, тоді загальна імовірність є добутком імовірності всіх подій, що відбулися:
у вигляді таблиці, тоді ті значення, що реалізувалися є такі, що мають максимальну імовірність. При тому, що ці події є незалежними, тоді загальна імовірність є добутком імовірності всіх подій, що відбулися:
![]() .
.
Якщо відомий розподіл вихідної величини, тоді критерій перетворюється у функцію від невідомих параметрів  . Задача полягає у знаходженні таких значень вектору параметрів
. Задача полягає у знаходженні таких значень вектору параметрів ![]() , при яких значення критерію є максимальним.
, при яких значення критерію є максимальним.
Тепер, нехай вихідна величина ![]() має нормальний розподіл з функцією середнього значення
має нормальний розподіл з функцією середнього значення ![]() і однаковою дисперсією
і однаковою дисперсією ![]() .
.
Тоді, підставляючи функцію густини розподілу
З критерію ПМВ приходимо до критерію МРК:
![]() .
.
Тепер представимо, що залежність функції середнього від параметрів лінійна:
![]() ,
,
де  - лінійно-незалежні функції.
- лінійно-незалежні функції.
Цей метод базується на масивах значень вхідних і вихідних сигналів ОУ, знятих через деякий інтервал часу ![]() - період квантування. Вхідний сигнал має містити як постійна, так і пробна складова. Постійна складова визначає положення робочої точки процесу, в околі якої і оцінюються параметри. Враховуючи те, що використовуються дискретні значення вхідних і вихідних сигналів, необхідно працювати з дискретними (цифровими) моделями об’єкта.
- період квантування. Вхідний сигнал має містити як постійна, так і пробна складова. Постійна складова визначає положення робочої точки процесу, в околі якої і оцінюються параметри. Враховуючи те, що використовуються дискретні значення вхідних і вихідних сигналів, необхідно працювати з дискретними (цифровими) моделями об’єкта.
Розглянемо методику застосування МНК на прикладі цифрової моделі першого порядку, яка задана у вигляді::
![]()
Структурна схема експериментів представлена на рисунку. Тут М - модель ОУ, - вхідні і вихідні сигнали, поточна помилка ідентифікації, вихідний сигнал моделі та вектор параметрів, які оцінюються.
- вхідні і вихідні сигнали, поточна помилка ідентифікації, вихідний сигнал моделі та вектор параметрів, які оцінюються.
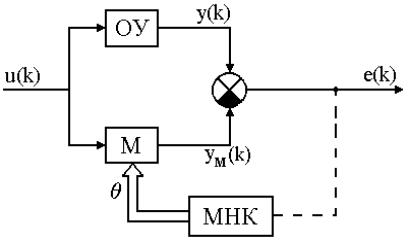
Рис. 1 Структурна схема експерименту.
Нехай, накоплено ![]() точок вимірювання вхідного і вихідного сигналів об’єкта. В МНК узагальнююча помилка розраховується наступним чином:
точок вимірювання вхідного і вихідного сигналів об’єкта. В МНК узагальнююча помилка розраховується наступним чином:
 ,
,
де 
Приклад.
Розглянемо ОУ з рівнянням:
![]()
ПФ має вигляд ![]() .
.
Потрібно оцінити коефіцієнти моделі ![]() , якщо відомі спостереження за динамікою об’єкту в певні квантова ні моменти часу
, якщо відомі спостереження за динамікою об’єкту в певні квантова ні моменти часу ![]()
Нехай, таблиця спостережень виглядає наступним чином
Екперимент, k | U(k) | Y(k) | Y(k+1) |
0 | 1 | 0 | 1 |
1 | 1 | 1 | 1,5 |
2 | 1 | 1,5 | 1,75 |
3 | 1 | 1,75 | 1,87 |
4 | 1 | 1,87 | 1,94 |
5 | 1 | 1,94 |
Виходить наступна СЛАУ
![]()
k | U | Y | y(k+1) | y^2 | yu | u^2 | yy(k+1) |
0 | 1 | 0 | 1 | 0 | 0 | 1 | 0 |
1 | 1 | 1 | 1,5 | 1 | 1 | 1 | 1,5 |
2 | 1 | 1,5 | 1,75 | 2,25 | 1,5 | 1 | 2,625 |
3 | 1 | 1,75 | 1,87 | 3,0625 | 1,75 | 1 | 3,2725 |
4 | 1 | 1,87 | 1,94 | 3,4969 | 1,87 | 1 | 3,6278 |
5 | 1 | 1,94 | 9,8094 | 6,12 | 5 | 11,0253 | |
9,8094 | 6,12 | 11,0253 | |||||
6,12 | 5 | 8,06 | |||||
delta | 11,5926 | c1 | 0,500259 | ||||
delta1 | 5,7993 | c2 | 0,999683 | ||||
delta2 | 11,58893 | ||||||
Для квантованої моделі:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
