

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Винт конвейера выполняют с правым или левым направлением спирали, одно-, двух - или трехзаходным. Поверхность винта может быть сплошной, ленточной или прерывистой в виде отдельных лопастей фасонной формы.
Винты со сплошной поверхностью применяют в основном для перемещения сухого мелкозернистого и порошкообразного насыпного груза, не склонного к слеживанию; с ленточной, лопастной и фасонной – при перемещении слеживающихся грузов, а также для выполнения некоторых технологических операций, например перемешивание различных грузов.
Вертикальные конвейеры (рисунок 9.1, б) относятся к конвейерам специального типа. Они состоят из подшипника со сплошными винтами, вращающимися в цилиндрическом кожухе (трубе); короткого горизонтального винта-питателя, тоже вращающегося в трубе, и одного или двух раздельных приводов для особых винтов. Разгрузка конвейера производится через патрубок вверху кожуха. Нижний участок вертикального винта, в который подается груз, делают либо переменного, уменьшающегося кверху диаметра, либо с уменьшенным шагом. Движение груза вверх происходит за счет увлечения его вертикальным винтом. При этом груз под действием центробежной силы прижимается к поверхности цилиндрического кожуха и под действием силы трения о нее и силы тяжести несколько отстает в движении от винтовой поверхности, т. е. вращается с меньшей угловой скоростью, чем угловая скорость винта. Поэтому подобно гайке, которая притормаживается на вращающемся винте, груз получает относительное движение вдоль оси винта, совершая абсолютное движение по винтовой траектории, но с меньшей осевой скоростью, чем скорость перемещаемой по этому винту невращающейся гайки.

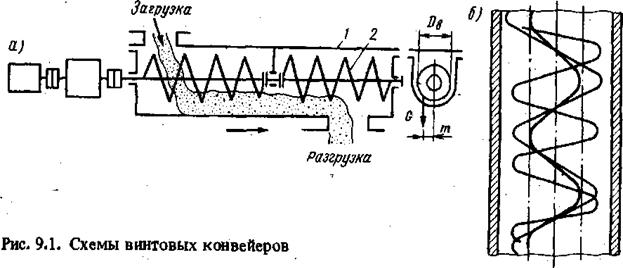
Рисунок 9.1. Схемы винтовых конвейеров
Для создания необходимой центробежной силы винт должен иметь достаточно большую частоту вращения, т. е. в противоположность горизонтальным винтам, для которых ограничивается максимальная частота вращения, на вертикальных винтах ограничивается ее минимально допустимое (критическое) значение, необходимое для перемещения груза вверх по винту.
К основным элементам винтовых конвейеров относятся винт и его опоры, желоба, привод, загрузочное и разгрузочное устройства. Винт конвейера изготовляется из труб, к которым привариваются лопасти. В качестве опор винтов применяют подшипники скольжения и качения. Длина секции винта 2-4 м. Каждые две секции трубчатых винтов соединяются коротким валом.
Желоб винтового конвейера изготовляют из листовой стали толщиной 3-6 мм. Для транспортирования абразивных и горячих (до 200 °С) грузов применяют желоба из чугуна, а для легких неабразивных грузов – из дерева с внутренней обшивкой листовой сталью.
Привод винтовых конвейеров редукторный, состоящий из электродвигателя, редуктора и муфт. В загрузочное устройство входит люк в крышке желоба конвейера и гибкий впускной патрубок, обеспечивающий герметичность при переходе сыпучего грунта в желоб конвейера из бункеров, других конвейеров или технологических машин (мельниц и др.). Разгрузочные устройства выполняют в виде отверстий в днище желоба, перекрываемых шиберными затворами.
9.2. Расчет основных параметров
Производительность винтового конвейера Q или V зависит от диаметр D, шага t, частоты вращения винта n и коэффициента заполнения поперечного сечения винта ![]() , т/ч,
, т/ч,
![]() ,
,
где ![]() – плотность груза, т/м3; с – поправочный коэффициент, зависящий от угла наклона конвейера
– плотность груза, т/м3; с – поправочный коэффициент, зависящий от угла наклона конвейера ![]() .
.
Скорость транспортирования, м/с,
![]()
Коэффициент заполнения ![]() во избежание скольжения груза промежуточных подшипников принимают относительно небольшим, и он зависит от свойств насыпных грузов. На наклонных винтовых конвейерах с движением груза вверх производительность уменьшается с возрастанием угла наклона, что должен учитывать коэффициент с.
во избежание скольжения груза промежуточных подшипников принимают относительно небольшим, и он зависит от свойств насыпных грузов. На наклонных винтовых конвейерах с движением груза вверх производительность уменьшается с возрастанием угла наклона, что должен учитывать коэффициент с.![]()
Шаг винта для сравнительно легкоперемещаемых грузов принимают равным ![]() , для трудно перемещаемых грузов его уменьшают до
, для трудно перемещаемых грузов его уменьшают до ![]() или принимают двух-, трехзаходные винты.
или принимают двух-, трехзаходные винты.
Частоту вращение винта выбирают в зависимости от рода перемещаемого груза и диаметра винта, которая должна обеспечивать спокойное, без пересыпания через вал, продвижение груза. Частота вращения уменьшается с увеличением диаметра винта, плотности и абразивности груза. Наибольшая допускаемая частота вращения (об/мин) винта ![]() (где
(где ![]() – коэффициент, зависящий от свойств груза).
– коэффициент, зависящий от свойств груза).
Диаметр винта выбирают по государственному стандарту из ряда 100, 125, 160, 200, 250, 320, 400, 500, 630 и 800 мм. При расчете диаметра винта, особенно при перемещении кусковых грузов, необходимо учитывать прочность кусков:
 ;
;  ,
,
где ![]() ,
, ![]() – соответственно средние и максимальные линейные размеры сортированных и рядовых грузов.
– соответственно средние и максимальные линейные размеры сортированных и рядовых грузов.
Общее сопротивление движению груза на винтовом конвейере складывается из сил трения груза о желоб и о поверхность винта, сопротивления в промежуточных и концевых подшипниках, а также сопротивления подъему при перемещении вверх по наклону.
Мощность двигателя определяется исходя из перечисленных сопротивлений, кВт,
 ,
,
где ![]() – скорость транспортирования, м/с;
– скорость транспортирования, м/с; ![]() – поправочный коэффициент запаса;
– поправочный коэффициент запаса; ![]() – сумма всех сопротивлений перемещенного груза, Н.
– сумма всех сопротивлений перемещенного груза, Н.
Потребная мощность вертикальных конвейеров складывается из мощности, затрачиваемой на подъем груза ![]() , потерь на трение груза о стенки желоба
, потерь на трение груза о стенки желоба ![]() , потерь на трение груза о винт
, потерь на трение груза о винт ![]() , внутренних потерь в грузе (перемещение, крошение и т. п.), т. е.
, внутренних потерь в грузе (перемещение, крошение и т. п.), т. е.
 ,
,
где ![]() – КПД привода.
– КПД привода.
Глава 10. Вибрационные конвейеры
10.1. Устройство и область применения
Вибрационная транспортирующая машина (ВТМ) состоит из колебательной системы. Общим признаком ВТМ, позволяющим отнести их к одному разряду машин, является колебательный характер движения грузонесущего органа, параметры которого определяются динамическими свойствами системы. К числу факторов, обусловливающих параметры движения машины, относятся внешние нагрузки, устройство колебательной системы, внутренние сопротивления, а также пневматические и динамические характеристики привода.
Простейшая ВТМ (рисунок 10.1) состоит из колебательной системы, включающей в себя массу и упругие связи (с жесткостью к и вязкостью с), а также из эксцентрикового привода (с упругой связью к0 и вязкостью с0). На колеблющуюся массу, являющуюся в данном случае грузонесущим органом машины, действуют нагрузки от транспортируемого груза – нормальная и тангенциальная. Кроме того, перемещению грузонесущего органа препятствуют внутренние сопротивления в упругих связях и элементах конструкции, принимаемые в первом приближении пропорциональными скорости его движения.
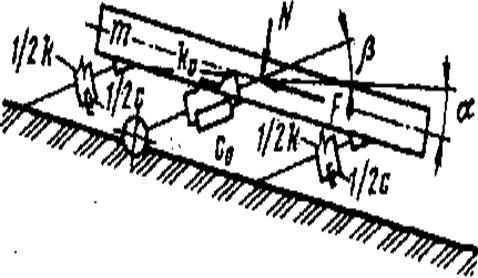
Рисунок 10.1. Расчетная схема одномассовой вибрационной транспортирующей машины
Уравнение движения грузонесущего органа машины под действием возмущающей силы привода ![]()
![]()
или после преобразования
![]()
В уравнении первый член левой части ![]() характеризует собой силы инерции колеблющейся массы, второй
характеризует собой силы инерции колеблющейся массы, второй ![]() – силы внутренних вязких сопротивлений и третий
– силы внутренних вязких сопротивлений и третий ![]() – силы упругих связей. В правой части второй и третий члены представляют собой нагрузки от перемещаемого груза, а первый член – возмущающую силу привода.
– силы упругих связей. В правой части второй и третий члены представляют собой нагрузки от перемещаемого груза, а первый член – возмущающую силу привода.
Привод машины в установившемся режиме сообщает колебательное движение ее грузонесущему органу, создавая возмущающую силу, которая преодолевает нагрузки перемещаемого груза и внутренние сопротивления, а также силы инерции колеблющихся масс или восстанавливающие силы упругих связей. Привод обеспечивает также предварительный разгон колеблющихся масс, машины, сообщая им начальный запас кинетической энергии.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
