

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для ревизии несущих канатов и оборудования линии дорога должна иметь смотровую скорость движения 03-0,5 м/с, что может быть обеспечено специальным микроприводом, соединенным с быстроходным валом редуктора основного привода.
При применении переменного тока используют синхронные двигатели как с фазным ротором, так и короткозамкнутые, при постоянном токе – с параллельным возбуждением для поддержания постоянства скорости движения. Для уменьшения инерционных сил при разгоне и торможении на дорогах тяжелого типа используются гидромуфты и тормоза с двухступенчатым торможением.
Тяговая способность привода определяется значением тягового коэффициента с, который зависит от угла обхвата и приведенного коэффициента трения  . Наибольшее распространение получают приводы с одножелобчатыми шкивами с углами обхвата до 300°. Коэффициент трения
. Наибольшее распространение получают приводы с одножелобчатыми шкивами с углами обхвата до 300°. Коэффициент трения ![]() помимо формы канавки, зависит от ряда других факторов, таких как род свивки каната, степени смазки его, удельного давления, скорости скольжения и состояния обода. В качестве футеровки приводных блоков широко применяют резину и пластмассу.
помимо формы канавки, зависит от ряда других факторов, таких как род свивки каната, степени смазки его, удельного давления, скорости скольжения и состояния обода. В качестве футеровки приводных блоков широко применяют резину и пластмассу.
Анализ тягового коэффициента![]() показывает, что одножелобчатый привод с резиновой футеровкой может заменить двухжелобчатый с деревянной футеровкой, которому свойственны недостатки, связанные с неравномерным износом желобов. Физическую картину явлений, происходящих при работе приводного блока, рассмотрим по рисунку 17.12.
показывает, что одножелобчатый привод с резиновой футеровкой может заменить двухжелобчатый с деревянной футеровкой, которому свойственны недостатки, связанные с неравномерным износом желобов. Физическую картину явлений, происходящих при работе приводного блока, рассмотрим по рисунку 17.12.
При огибании блока натяжение каната изменяется на значение окружного усилия ![]() , чему соответствует относительное удлинение каната
, чему соответствует относительное удлинение каната ![]() . Так как усилие
. Так как усилие ![]() передается по дуге окружности
передается по дуге окружности![]() то натяжение каната не остается постоянным, и по мере поворота блока происходит упругое скольжение каната по блоку, что вызывает износ желобов блока и поверхности каната. При частичном использовании общей дуги обхвата скольжение происходит в угле
то натяжение каната не остается постоянным, и по мере поворота блока происходит упругое скольжение каната по блоку, что вызывает износ желобов блока и поверхности каната. При частичном использовании общей дуги обхвата скольжение происходит в угле ![]() определяемом условием
определяемом условием  Упругое скольжение будет происходить в границах того же угла
Упругое скольжение будет происходить в границах того же угла ![]() . На остальной дуге (дуге покоя) натяжение сохраняет свое значение
. На остальной дуге (дуге покоя) натяжение сохраняет свое значение ![]() . При полном использовании сцепления, когда
. При полном использовании сцепления, когда ![]() возникает уже не только упругое скольжение, но и буксование каната по всей поверхности блока. Поэтому чтобы исключить упругое проскальзывание каната, угол
возникает уже не только упругое скольжение, но и буксование каната по всей поверхности блока. Поэтому чтобы исключить упругое проскальзывание каната, угол![]() должен быть меньше угла а, так как должно выполняться условие
должен быть меньше угла а, так как должно выполняться условие 
При необходимости передачи значительного окружного усилия применяют многожелобчатые приводы (рисунок 17.13). В таких приводах окружные усилия, передаваемые отдельными желобами, будут неодинаковыми. Рассмотрим это для случая трехжелобчатого привода с разными углами обхвата и одинаковым значением коэффициента трения д. Натяжения ветвей каната при полном использовании сцепления определяются условиями:
где ![]() – натяжение в тяговом канате на выходе с привода, Н;
– натяжение в тяговом канате на выходе с привода, Н;  – углы обхвата, рад.;
– углы обхвата, рад.; ![]() – натяжения в канатах после прохождения первого и второго шкивов, Н; µ – коэффициент трения между канатом и шкивом; Smax – натяжение в тяговом канате на входе в привод.
– натяжения в канатах после прохождения первого и второго шкивов, Н; µ – коэффициент трения между канатом и шкивом; Smax – натяжение в тяговом канате на входе в привод.
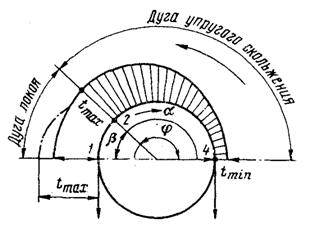
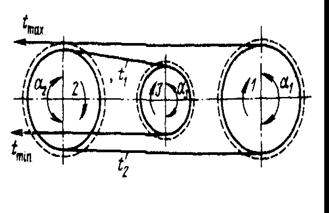
Рисунок 17.12.Диаграмма натяжений каната на приводном блоке | Рисунок 17.13. Схема трехжелобчатого привода |
Соответствующие натяжениям окружные усилия
При равных углах обхвата
но так как
то имеем

Таким образом, в результате разного значения окружного усилия износ желобов от упругого скольжения будет разным. Вследствие этого диаметры желобов будут неодинаковыми, и возникает дополнительное проскальзывание каната для компенсации разности окружных скоростей блоков. Это проскальзывание будет происходить на том из блоков, у которого дуга покоя будет отсутствовать (блок сбегающей ветви) и, следовательно, сцепление использовано полностью.
Рассмотрим последствия этого явления на многожелобчатом приводе (рисунок 17.13). При передаче окружного усилия на блоках 1 и 2 происходит полное использование тяговой характеристики, и дуга покоя отсутствует. На блоке 3, если максимальное окружное усилие будет больше фактического, т. е. выполняется условие  , то будет иметь место дуга покоя. Если же окружное усилие окажется меньше фактического, т. е.
, то будет иметь место дуга покоя. Если же окружное усилие окажется меньше фактического, т. е.  , произойдет проскальзывание каната на блоке 3.
, произойдет проскальзывание каната на блоке 3.
Наиболее неблагоприятными условиями, ухудшающими работу многожелобчатого привода, являются наличие сильных и внезапных повышений окружного усилия, работа привода на торможение, работа привода с переменным направлением вращения. Для устранения вредных последствий, возникающих вследствие разницы диаметров желобов, используется замена многожелобчатого блока рядом одножелобчатых, т. е. применяются уравнительные приводы.
Уравнительный привод (рисунок 17.14) состоит из нескольких одножелобчатых приводных блоков, приводимых во вращение от одного общего двигателя и связанных между собой дифференциальными передачами, которые позволяют каждому блоку вращаться независимо друг от друга с разной скоростью. Уравнительный привод обладает преимуществом в отношении полного предотвращения последствий неравенства диаметров блоков. Он также исключает возможность проскальзывания каната и перенапряжения его промежуточных ветвей.
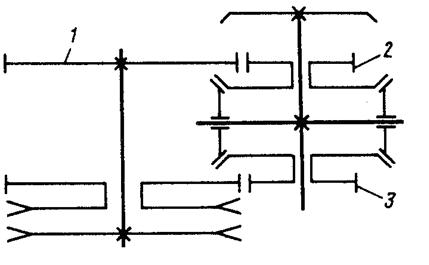
Рисунок 17.14. Схема уравнительного двухканатного привода
Для того чтобы в уравнительном приводе полностью использовать сцепление каната на каждом блоке, необходимо распределять крутящий момент в следующем соотношении:
при условии, если все блоки имеют одинаковый диаметр. Если это условие выполнено, то сцепление на всех блоках будет использовано полностью, и наибольшее окружное усилие, передаваемое уравнительным приводом, будет равно окружному усилию, аналогичному усилию привода с многожелобчатым блоком.
В уравнительном приводе с симметричной дифференциальной передачей при одинаковом передаточном числе между шестернями 1-3 и одинаковом радиусе приводных блоков будет соблюдаться следующее условие:
![]()
Если обозначить минимальное натяжение каната на сбегающей ветви ![]() то наибольшее усилие, передаваемое каждым блоком при угле обхвата каждого блока
то наибольшее усилие, передаваемое каждым блоком при угле обхвата каждого блока ![]() составит
составит
![]()
и полное окружное усилие по условиям сцепления
![]()
откуда
![]()
Если в многожелобчатом приводе отношение окружных усилий ![]() то в дифференциальном
то в дифференциальном ![]() так как
так как ![]()
Поэтому в уравнительном приводе невозможно использовать полностью сцепления на приводных блоках, и часто приходится увеличивать натяжение каната. Недостатком уравнительных приводов является их более сложная конструкция по сравнению с простыми приводами.
Повышение тягового фактора возможно также за счет увеличения силы давления между канатом и блоком посредством зажимов или прижимов, расположенных равномерно по длине окружности обода.
Приводные блоки с зажимами могут иметь зажимы распорного и ножничного типов (рисунок 17.15), в которых канат расклинивается под действием радиального давления, вызываемого натяжением каната. Распорные зажимы (рисунок 17.15, а) состоят из двух, не связанных между собой распорных кулачков, которые опираются на центральную пружину и передают распорное усилие, вызванное радиальным давлением каната на боковые поверхности обода. Ножничные зажимы стоячего типа (рисунок 17.15, б) представляют собой два связанных между собой пружиной двуплечих рычага, которые соединены шарниром и опираются нижними концами на поверхность обода.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
