

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Перемещение груза по грузонесущему органу осуществляется за счет использования сил инерции и сил трения транспортирующей поверхности. Направленное перемещение грузов при возвратно-поступательных колебательных движениях грузонесущего органа обеспечивается асимметрией сил инерции или сил трения. Асимметрия сил сухого трения достигается изменением нормальной реакции груза на грузонесущий орган при движении его в прямом и обратном направлениях, асимметрия же инерционных воздействий – сообщением грузонесущему органу движения в противоположные стороны с различными ускорениями.
Вибрационные конвейеры работают в режиме с подбрасыванием перемещаемого груза. При принятых на практике амплитудных колебаниях такой режим работы достигается при большом числе колебаний, поэтому для вибрационных конвейеров типична быстроходность.
Характер движения рабочего органа (амплитуда и форма траектории) определяются возмущающей силой, характеристиками упругих элементов, а также массами и скоростями движущихся частей. Основные узлы виброконвейера – грузонесущий орган, упругая система, рама, вибратор и привод. Достоинство вибрационных конвейеров – малый расход энергии.
При движении насыпного груза на грузонесущий орган вибрационного конвейера, помимо веса, силы трения о желоб и силы инерции, действуют силы взаимного трения частиц, переменное давление воздуха, силы соударения частиц и др. Так, например, при подбрасывании слоя сыпучего материала между ним и днищем желоба образуется разряжение, в связи с чем появляется избыточное давление на поверхности слоя материала. Периодическое возникновение разности давления с частотой, пропорциональной частоте колебания желоба, обусловливает проникновение воздуха в материал. В результате на частицы действует пульсирующий аэродинамический напор, который частично взвешивает их, и они движутся по более сложному закону, чем тело, брошенное в безвоздушном пространстве. Это придает материалу текучесть, ослабляет контакт трения материала с желобом и способствует уменьшению его износа. Влияние давления воздуха зависит от газопроницаемости слоя и тем существенней, чем мельче материал. Однако ослабление контакта материала и желоба целесообразно лишь в некоторых пределах, пока оно не сказывается на ускорении материала, необходимом для интенсивного перемещения по желобу.
Вибрационные конвейеры разделяют: по типу привода – инерционные, эксцентриковые, электромагнитные, гидравлические и пневматические; по режиму работы – резонансные и зарезонансные; по устройству динамической системы – неуравновешенные, уравновешенные и виброизолированные; по числу колеблющихся масс – одно - и многомассовые; по углу наклона – горизонтальные (наклонные и вертикальные); по числу привода – одно - и многоприводные; по устройству грузонесущего органа – с открытыми желобами, с закрытыми желобами или трубами.
Вибрационные конвейеры одновременно с транспортированием груза часто используются для выполнения технологических операций, таких, как разделение по крупности, обезвоживанию, сушке. Производительность вибрационных конвейеров 100-500 м3/ч, в наиболее мощных моделях 300 м3/ч. Углы подъема их не должны превышать 10°, так как с их увеличением снижается производительность. Наклон конвейера 5-15° способствует увеличению производительности установки.
Виброконвейеры должны устанавливаться строго прямолинейно. При криволинейной трассе в плане располагают несколько виброконвейеров под углом один к другому.
Достоинства виброконвейеров – незначительное измельчение перемещаемого груза в процессе транспортирования, малый износ грузонесущего органа, простота конструкции транспортных установок, полное отсутствие трущихся и быстроизнашивающихся деталей, легкость обслуживания и ухода, невысокая энергоемкость, безопасность эксплуатации. К недостаткам можно отнести затруднение при транспортировании липких материалов. Область целесообразного применения вибрационных конвейеров – транспорт на обогатительных фабриках и в поверхностных комплексах подземных рудников – вибровыпуск руды.
Наибольшее распространение получили эксцентриковые и гидравлические виброконвейеры уравновешенного типа, так как они не требуют специальных фундаментов для установки.
Вибрационные конвейеры (рисунок 10.2, а) состоят из грузонесущего органа 1, который опирается на рессоры 2, и получают колебания от инерционного вибратора 3. По характеру динамической уравновешенности конвейеры этого типа относятся к одномассовым динамически неуравновешенным. Более совершенными в отношении уравновешивания являются двухмассовые конвейеры (рисунок 10.2, б).
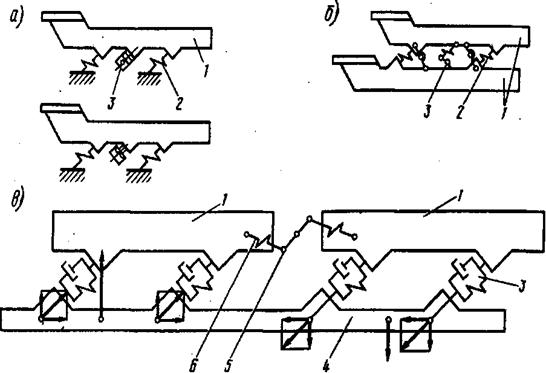
Рисунок 10.2. Схемы вибрационных конвейеров
Центр инерции системы, на обе массы которой передаются равные по значению, но противоположные по направлению возмущающие силы, остается в покое. Поэтому если система имеет опорные стойки в центре инерции, то устраняется передача динамических нагрузок на опоры. В качестве реактивной массы используют второй рабочий желоб или специальную массу, например, раму. Двухмассовые конвейеры обычно работают в режиме, близком к резонансному, благодаря чему возрастает производительность и возможно увеличение длины конвейера на один привод. Для горных предприятий разработан ряд малогабаритных вибрационных конвейеров с предельным уравновешиванием колеблющихся масс. Конвейер состоит из двух последовательно установленных грузонесущих органов 1, которые опираются через упругие элементы 3 на опорную раму 4. Привод виброконвейера осуществляется эксцентриковым или гидравлическим вибратором 5, сообщающим органом колебания в противофазе. Для облегчения пуска конвейера и уменьшения пусковой мощности двигателя шатуны вибратора соединены с грузонесущим органом через упругие элементы 6.
Вследствие колебаний грузонесущих органов в противофазе горизонтальные составляющие реакции упругих элементов приложены к опорной раме и направлены в противоположные стороны, и поэтому уравновешиваются. Оставшиеся неуравновешенными вертикальные реакции невелики, так как угол вибрации составляет 20 и в значительной степени компенсируется поперечной гибкостью рамы.
10.2. Расчет основных параметров
К основным параметрам вибрационных конвейеров относятся скорость транспортирования (производительность), нагрузки на грузонесущий орган и затраты энергии на перемещение груза.
Рассмотрим закономерности вибротранспортирования насыпного груза, представленного упруговязкопластичной моделью среды, по грузонесущему органу вибрационного конвейера, наклоненного под углом а к горизонту, совершающему гармонические колебания по закону х=Аsin![]() , направленные под углом
, направленные под углом ![]() (рисунок 10.3).
(рисунок 10.3).
На груз в процессе транспортирования действуют сила тяжести mg, силы упругости ку, силы, обусловленные гистерезисными сопротивлениями, силы сопротивления воздуха  , а также сила сухого трения
, а также сила сухого трения ![]() (где
(где ![]() – коэффициент трения; N – нормальная реакция груза на поверхность грузонесущего органа). В процессе вибротранспортирования груз перемещается, то в контакте с грузонесущим органом, то отрываясь от него. Движение груза массой по грузонесущему органу описывается следующей системой дифференциальных уравнений:
– коэффициент трения; N – нормальная реакция груза на поверхность грузонесущего органа). В процессе вибротранспортирования груз перемещается, то в контакте с грузонесущим органом, то отрываясь от него. Движение груза массой по грузонесущему органу описывается следующей системой дифференциальных уравнений:
- на участке совместного движения

![]()
![]()

 (+1 при Х>0; -1 при Х<0)
(+1 при Х>0; -1 при Х<0)
- на участке полета

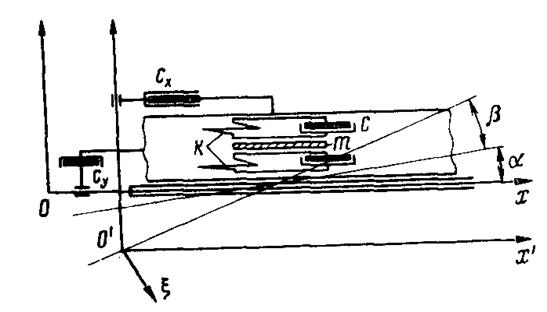
Рисунок 10.3. Упруговязкая модель виброконвейера
Нормальная реакция груза на грузонесущий орган (нагрузка) определяется из выражения N= ку+су. Груз движется в контакте с грузонесущим органом до момента, пока нормальная реакция не обратится в нуль. При N=0 груз начинает свободное падение. От свободного движения к совместному груз переходит в направление оси и обращается в нуль, т. е. при выполнении условии у=0.
Расчеты режимов вибротранспортирования производятся обычно с
помощью аналоговых и цифровых машин. Рассчитав значения перемещений х*, у*, х, у груза определяют среднюю скорость транспортирования:
где t0, tп – моменты отрыва и падения груза на грузонесущий орган.
Затраты энергии на транспортирование
где F*, N* – соответственно тангенциальная и нормальная нагрузка на грузонесущий орган.
Глава 11. Роликовые конвейеры
11.1. Неприводные роликовые конвейеры
Роликовые конвейеры служат для транспортирования штучных грузов (слитков, профильного проката, ящиков, досок, поддонов, конвейеров и др.) по горизонтали или под небольшим углом наклона по стационарным вращающимся роликам (дискам). Необходимым условием перемещения является наличие у грузов плоской опорной поверхности, прямолинейных ребер и образующих. По способу действия роликовые конвейеры разделяют на неприводные и приводные. В первом случае груз движется под действием непосредственно приложенной к ним движущей силы или под уклон самоходом (гравитационные конвейеры), во втором ролики приводятся во вращение двигателем и сообщают движение лежащим на них грузам. Для перемещения грузов на неприводном конвейере используют цепные захваты, толкающие штанги. В некоторых случаях нетяжелые грузы можно перемещать вручную.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
