

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис.4.6.
Ясно, что угловое перемещение всех точек твердого тела за одно и то же время будет одинаковым. Это обстоятельство позволяет ввести общую кинематическую характеристику - угловую скорость
![]() (4.6)
(4.6)
где ![]()
![]() - угол поворота тела за время
- угол поворота тела за время ![]()
Можно ввести вектор элементарного углового перемещения ![]()
![]() направленный вдоль оси вращения в соответствии с правилом правого буравчика: если рукоятку буравчика поворачивать в направлении вращения тела, то поступательное перемещение буравчика даст направление
направленный вдоль оси вращения в соответствии с правилом правого буравчика: если рукоятку буравчика поворачивать в направлении вращения тела, то поступательное перемещение буравчика даст направление ![]()
![]() . Устремляя интервал времени
. Устремляя интервал времени ![]()
![]() , за которое произошло угловое перемещение
, за которое произошло угловое перемещение ![]()
![]() к нулю, мы получим вектор угловой скорости:
к нулю, мы получим вектор угловой скорости:
![]() (4.7)
(4.7)
который определяет, во-первых, модуль угловой скорости тела, во-вторых, - ориентацию оси вращения в пространстве, а в-третьих, - направление вращения тела. Следует подчеркнуть, что ![]()
![]() - вектор «скользящий» в том смысле, что его начало можно совместить с любой точкой, принадлежащей оси вращения. Например, для Земли, вращающейся вокруг своей оси с запада на восток, вектор
- вектор «скользящий» в том смысле, что его начало можно совместить с любой точкой, принадлежащей оси вращения. Например, для Земли, вращающейся вокруг своей оси с запада на восток, вектор ![]() имеет направление от южного полюса к северному.
имеет направление от южного полюса к северному.
Величина угловой скорости Земли:![]()
![]()
Для сравнения: угловая скорость орбитального движения Земли составляет:
![]()
Заметим, что период орбитального вращения не кратен продолжительности суток, что создает известные трудности в построении календаря (необходимо вводить високосные годы и проч.). Зная ![]()
![]() легко определить линейную скорость любой точки твердого тела. Введем радиус-вектор
легко определить линейную скорость любой точки твердого тела. Введем радиус-вектор ![]()
![]() некоторой точки А твердого тела, поместив его начало в точку О на оси вращения (рис.4.7).
некоторой точки А твердого тела, поместив его начало в точку О на оси вращения (рис.4.7). ![]()
![]() - вектор, проведенный в точку А от оси вращения, то есть перпендикулярно оси.
- вектор, проведенный в точку А от оси вращения, то есть перпендикулярно оси.
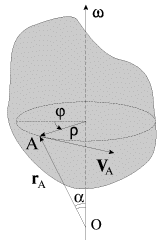
Рис.4.7.
Плоское движение - это такое движение твердого тела, при котором траектории всех его точек лежат в параллельных плоскостях. Если в теле провести некоторую прямую O1O2, перпендикулярную этим плоскостям (рис. 1.9), то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, или, как его иногда называют, плоско-параллельном, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
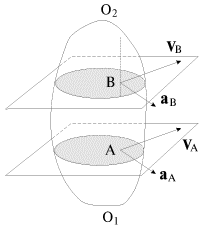
Рис. 4.8
Обратимся к классическому простому примеру плоского движения - качению цилиндра по плоскости без проскальзывания. Рассматривая одно из сечений цилиндра плоскостью, перпендикулярной его оси, мы придем к известное задаче о катящемся колесе (рис. 1.10). Центр колеса движется прямолинейно, траектории других точек представляют собой кривые, называемые циклоидами.
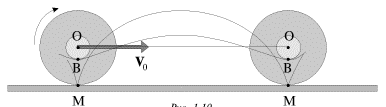
Рис. 4.9
При отсутствии проскальзывания мгновенная скорость самой нижней точки колеса (точки M) равна нулю. Это позволяет рассматривать качение колеса как суперпозицию двух движений: поступательного со скоростью оси ![]()
![]() и вращательного с угловой скоростью
и вращательного с угловой скоростью ![]()
![]() , где
, где ![]() - радиус колеса. Ясно, что в этом случае
- радиус колеса. Ясно, что в этом случае ![]()
![]()
Попробуем обобщить этот прием на произвольное плоское движение.
Выделим отрезок АB в рассматриваемом сечении твердого тела (рис.4.10). Перевод сечения из положения 1 в положение 2 можно рассматривать как суперпозицию двух движений: поступательного из 1 в 1' и вращательного из 1' в 2 вокруг точки A', называемой обычно полюсом (рис. 4.10а). Существенно, что в качестве полюса можно выбрать любую точку, принадлежащую сечению или даже лежащую в плоскости сечение вне его. На рис.4.10б, к примеру, в качестве полюса выбрана точка В. Обратите внимание: длина пути при поступательном перемещении изменилась (в данном случае увеличилась), но угол поворота остался прежним!
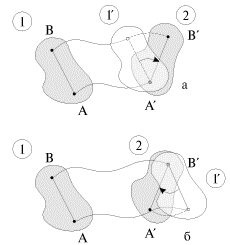
Рис.4.10
Приближая конечное положение тела к начальному (сокращая рассматриваемый промежуток времени), приходим к выводу: плоское движение твердого тела в любой момент времени можно представить как суперпозицию поступательного движения со скоростью некоторой точки, выбранной в качестве полюса, и вращения вокруг оси, проходящей через полюс. В реальной ситуации оба эти движения, естественно, происходят одновременно. Существенно, что разложение на поступательное и вращательное движения оказывается неоднозначным, причем в зависимости от выбора полюса скорость поступательного движения будет изменяться, а угловая скорость вращения останется неизменной.
По аналогии с мгновенной осью вращения можно ввести мгновенную ось, ускорения всех точек которой в данный момент времени равны нулю. При этом следует иметь в виду, что эта ось, вообще говоря, не совпадает с мгновенной осью вращения. Так, в примере с колесом, катящимся по плоскости с постоянной скоростью, она проходит через центр колеса.
Пара сил, момент пары
Если на тело действует несколько сил, равнодействующая которых равна нулю, а результирующий момент относительно какой-либо оси не равен нулю, то тело не останется в равновесии. Так будет, например, если на тело действуют две равные и противоположные силы, не лежащие на одной прямой. Такие две силы, совместно действующие на тело, называют парой сил. Если тело закреплено на оси, то при действии на него пары сил оно начнет вращаться вокруг этой оси. При этом, вообще говоря, со стороны оси на тело будет действовать сила. Можно показать, что если ось проходит через определенную точку тела, то сила со стороны оси отсутствует. Поэтому, если пара сил будет действовать на свободное тело, то оно начнет вращаться вокруг оси, проходящей через эту точку. Можно доказать, что эта точка — центр тяжести тела.

Рис. 4.11
Момент пары сил одинаков относительно любой оси, перпендикулярной к плоскости пары. Действительно, пусть О — произвольная ось, перпендикулярная к плоскости, в которой лежит пара (рис. 4.11). Суммарный момент М равен:
M = F•OA + F•OB = F(OA + OB) = F•l,
где l — расстояние между силами, составляющими пару.
Этот же результат получится и при любом другом положении оси. Можно показать также, что момент нескольких сил, равнодействующая которых равна нулю, будет один и тот же относительно всех осей, параллельных друг другу, и поэтому действие всех этих сил на тело можно заменить действием одной пары сил с тем же моментом.
Пара сил представляет собой неуравновешенную систему, которая не может быть заменена одной силой. Пара сил не имеет равнодействующей.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 |
