

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() численно равны, имеют общую линию действия, но направлены в противоположные стороны (рис. 4.15). Поэтому их моменты
численно равны, имеют общую линию действия, но направлены в противоположные стороны (рис. 4.15). Поэтому их моменты ![]() и
и ![]() относительно
относительно
точки О численно равны и противоположны по направлению (на рис. 4.4 точки mi, mk и О лежат в горизонтальной плоскости, а векторы ![]() и
и ![]() перпендикулярны этой плоскости). Действительно,
перпендикулярны этой плоскости). Действительно, ![]() , где
, где ![]() - вектор, проведенный из точки mi в точку mk. Поэтому
- вектор, проведенный из точки mi в точку mk. Поэтому ![]() так как векторное произведение векторов
так как векторное произведение векторов ![]() и
и ![]() , направленных вдоль одной прямой, равно нулю.
, направленных вдоль одной прямой, равно нулю.
На основании изложенного уравнение (4.14) можно записать в следующем виде:
![]()
![]() (4.15)
(4.15)
Таким образом, скорость изменения момента импульса тела, вращающегося вокруг неподвижной точки, равна результирующему моменту относительно этой точки всех внешних сил, приложенных к телу.
Полученный результат называется основным законом динамики вращательного движения тела, закрепленного в одной неподвижной точке. Момент импульса является основной динамической характеристикой твердого тела, вращающегося вокруг неподвижной точки.
Получим выражение для L в случае твердого тела произвольной формы, закрепленного в некоторой точке О.
Пусть ![]() - радиус-вектор элементарной массы
- радиус-вектор элементарной массы ![]() твердого тела, а
твердого тела, а ![]() - угловая скорость. Тогда
- угловая скорость. Тогда
 (4.15)
(4.15)
Векторы ![]() и L можно проектировать как на оси лабораторной системы XYZ, так и на оси системы xyz, жестко связанной с твердым телом (поскольку точка О неподвижна, начала обеих систем можно совместить). Преимущество системы xyz заключается в том, что в ней проекции
и L можно проектировать как на оси лабораторной системы XYZ, так и на оси системы xyz, жестко связанной с твердым телом (поскольку точка О неподвижна, начала обеих систем можно совместить). Преимущество системы xyz заключается в том, что в ней проекции ![]() являются постоянными величинами (в системе XYZ они зависят от времени), и выражения для компонент L, оказываются проще.
являются постоянными величинами (в системе XYZ они зависят от времени), и выражения для компонент L, оказываются проще.
Итак, в системе xyz
![]() (4.16)
(4.16)
Тогда, продолжая (4.16), можно записать:
![]() (4.17)
(4.17)
Выражения для проекций момента импульса на оси системы xyz запишем в следующем виде:
![]() (4.18)
(4.18)
![]() (4.19)
(4.19)
![]() (4.20)
(4.20)
Или
![]() (4.21)
(4.21)
![]() (4.22)
(4.22)
![]() (4.23)
(4.23)
где ![]() - 9 компонент так называемого тензора инерции
- 9 компонент так называемого тензора инерции ![]() твердого тела относительно точки О:
твердого тела относительно точки О:
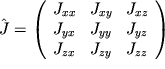 (4.24)
(4.24)
Диагональные элементы тензора ![]() называются осевыми моментами инерции, недиагональные элементы
называются осевыми моментами инерции, недиагональные элементы ![]() называются центробежными моментами инерции. Обратим внимание, что
называются центробежными моментами инерции. Обратим внимание, что ![]() Такой тензор называют симметричным.
Такой тензор называют симметричным.
Если координатам x, y и z присвоить номера 1, 2 и 3 соответственно, то (4.21-4.24) можно представить в виде
 (4.25)
(4.25)
В символическом виде можно записать так:
![]() (4.26)
(4.26)
Самое главное, что стоит за приведенными выше формулами, заключается в следующем. Девять величин ![]() (из них шесть независимых) определяют однозначную связь между L и
(из них шесть независимых) определяют однозначную связь между L и ![]() причем оказывается, что L, вообще говоря, не совпадает по направлению с
причем оказывается, что L, вообще говоря, не совпадает по направлению с ![]() (рис. 2.5)
(рис. 2.5)
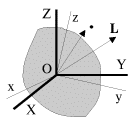
Рис. 4.15.
Итак, мы столкнулись с новым типом величин, имеющим важное значение в физике - тензором. Если для задания скалярной величины необходимо одно число (значение скалярной величины), векторной - три числа (три проекции вектора на оси декартовой системы координат), то для задания тензора необходимы в общем случае 9 чисел. На языке математики тензор - это многокомпонентная величина, характеризующаяся определенным поведением при преобразованиях системы координат (в данном случае компоненты тензора инерции преобразуются как произведения соответствующих координат).
Необходимость введения тензорных величин связана с различного рода анизотропией свойств физических макроскопических объектов. Тензор связывает две векторные величины, которые пропорциональны друг другу по модулю, но в силу анизотропии свойств объекта не совпадают друг с другом по направлению. В случае L и ![]() решающую роль играет "анизотропия" формы тела (отсутствие определенной симметрии относительно осей xyz). В других случаях это может быть анизотропия, например, электрических или магнитных свойств вещества.
решающую роль играет "анизотропия" формы тела (отсутствие определенной симметрии относительно осей xyz). В других случаях это может быть анизотропия, например, электрических или магнитных свойств вещества.
Кинетическая энергия и работа при вращении тела
Рассмотрим абсолютно твердое тело, вращающееся вокруг неподвижной оси. Если мысленно разбить это тело на n точек массами m1, m2, …, mn, находящихся на расстояниях r1, r2, …, rn от оси вращения, то при вращении они будут описывать окружности и двигаться с различными линейными скоростями v1, v2, …, vn. Так как тело абсолютно твердое, то угловая скорость вращения точек будет одинакова:
Кинетическая энергия вращающегося тела есть сумма кинетических энергий его точек, т. е.
![]()
Учитывая связь между угловой и линейной скоростями, получим:
![]() (4.27)
(4.27)
Сопоставление формулы (4.16) с выражением для кинетической энергии тела, движущегося поступательно со скоростью v, показывает, что момент инерции является мерой инертности тела во вращательном движении.
Если твердое тело движется поступательно со скоростью v и одновременно вращается с угловой скоростью щ вокруг оси, проходящей через его центр инерции, то его кинетическая энергия определяется как сумма двух составляющих:
![]() (4.28)
(4.28)
где vc – скорость центра масс тела; Jc - момент инерции тела относительно оси, проходящей через его центр масс.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 |
