

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Участок характеристики от точки идеального холостого хода до критической точки называют рабочей частью механической характеристики. Только на этом участке возможна устойчивая работа асинхронного электродвигателя при моменте нагрузки, независящем от скорости вращения (как это обычно имеет место в ме-
таллорежущих станках). Величина номинального скольжения зависит от номинальной мощности, типа электродвигателя и находится в пределах 0,02-0,12; при этом электродвигатели большей мощности имеют меньшую величину скольжения.
Кроме асинхронных электродвигателей нормального исполнения выпускают электродвигатели с повышенным скольжением (0,07-0,16) и пусковым моментом. Электродвигатели с нормальным скольжением имеют жесткую характеристику и применяются в большинстве станков, а электродвигатели, с повышенным скольжением имеют мягкую характеристику и применяются в приводах станков с частым включением электродвигателя и значительной нагрузкой при пуске. На рисунке 32 кривая 1 соответствует электродвигателю с жесткой характеристикой, а кривая 2 - с мягкой. При прочих равных условиях электродвигатель с мягкой характеристикой имеет меньшую номинальную частоту и больший пусковой момент Мп. На рисунке 32 точка А соответствует номинальной нагрузке.
В каталогах обычно приводят основные данные асинхронных двигателей: номинальная мощность на валу NH, кВт; номинальная частота вращения п, об/мин;
 синхронная частота вращения п0, об/мин; отношения(где Мн и Мп - со-
синхронная частота вращения п0, об/мин; отношения(где Мн и Мп - со-
![]() ответственно номинальный и пусковой моменты электродвигателя). Величина номинального момента
ответственно номинальный и пусковой моменты электродвигателя). Величина номинального момента
Кратность критическогомомента - это величина, определяющая допустимую механическую перегрузку электродвигателя![]()
Величина критического момента зависит от напряжения сети. Так как напряжение может колебаться, то наибольший допустимый момент перегрузки обычно принимают 0,85 Мк. Кратность пускового момента у короткозамкнутых асинхронных двигателей бщепромышленного примененияЭлектродвигатели главного привода пускают без нагрузки, поэтому пусковой момент
бщепромышленного примененияЭлектродвигатели главного привода пускают без нагрузки, поэтому пусковой момент достаточен. Для элек-тродвигателей, включаемых работу под нагрузкой, необходим большой пусковой момент.
достаточен. Для элек-тродвигателей, включаемых работу под нагрузкой, необходим большой пусковой момент.
Пуск асинхронных двигателей. При пуске асинхронных двигателей с короткозамкнутым ротором пусковой электрический ток превышает номинальный в 4 - 8 раз. Толчок пускового электрического тока вызывает в сети понижение напряжения. Если при пуске электродвигателя большой мощности напряжение значительно понизится, то уменьшится его пусковой момент, а другие электродвигатели, работающие в это время с перегрузкой, могут остановиться (перейти в режим короткого замыкания). Поэтому асинхронный электродвигатель можно пускать без применения средств, ограничивающих пусковой электрический ток, лишь в том случае, когда номинальная мощность электродвигателя составляет не более 25% мощности трансформаторов, питающих сеть цеха. Асинхронные электродвигатели с фазовым ротором запускают с помощью реостата, включенного в це^&рупидование скорости вращения электродвигателей. Частота вращения ротора асинхронного короткозамкнутого электродвигателя
где f - частота переменного тока, Гц; р - число пар полюсов статора электродвигателя; s - скольжение ротора.
Из формулы видно, что частоту вращения ротора можно регулировать изменением частоты электрического тока, скольжения или числа пар полюсов. Первым способом можно регулировать частоту вращения только при наличии отдельного генератора переменного тока для питания электродвигателя. Во всех остальных случаях частота переменного тока в сети является постоянной величиной. Регулирование частоты вращения путем изменения скольжения осуществляется введением активного сопротивления в цепь ротора, что возможно только у электродвигателей с фазовым ротором.
Наиболее широкое применение в металлорежущих станках (особенно в многоскоростных электродвигателях) получил способ регулирования частоты вращения изменением числа пар полюсов.
Торможение электродвигателей может производиться механическим или электрическим способами. К электрическим методам торможения относятся торможение с рекуперацией, электродинамическое торможений, торможение противотоком и др.
Торможение с рекуперацией возможно только для многоскоростных электродвигателей. Сущность его заключается в том, что электродвигатель, оставаясь не отключенным от сети электрического тока, переключается на низшую скорость, в результате чего он переходит на генераторный режим и отдает в сеть электрическую энергию, благодаря чему электродвигатель тормозится и приближается к ре-, жиму переключенной низшей скорости. Дальнейшее торможение осуществляется механическим или другими способами. Электродинамическое торможение производится дополнительной подачей в обмотку статора постоянного тока, в результате чего в статоре возникает постоянное магнитное поле, которое тормозит вращающееся магнитное поле и останавливает электродвигатель. После полной остановки электродвигатель особым устройством автоматически отключается от сети.
Торможение противотоком (противовключение) осуществляют переключением двух фаз обмотки статора. При этом меняется направление вращающегося магнитного поля, которое действует на вращающийся по инерции ротор и тормозит его. В конце торможения электродвигатель автоматически отключается от электрической сети. Этот способ имеет широкое применение в станках в силу его простоты и надежности.
Реверсирование электродвигателей производят переключением любых двух внешних зажимов (фаз) электродвигателя.
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
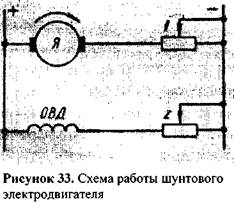
Электродвигатели постоянного тока с параллельным возбуждением (шунто-вые) получили широкое применение для привода тяжелых станков. Их включают по схеме, показанной на рисунке 33. Обмотка якоря Я подключена к сети через пусковой реостат 1 , а обмотка возбуждения ОВД - через реостат 2, служащий для изменения частоты вращения.
Для электродвигателей постоянного тока момент на валу электродвигателя и частота вращения
где k=0,05 -^0,12 - коэффициент пропорциональности; 1Я - сила тока в цепи якоря, A; U - напряжение сети, В; Ф - магнитный электрический поток электродвигателя, Вб; гя - сопротивление цепи якоря, Ом; с - постоянная данного электродвигателя.
|
Механические характеристики электродвигателя приведены на рисунке 34. Цифрой 1 обозначена линия, соответствующая естественной механической характеристике. Относительно малая величина сопротивления обмотки якоря обуславливает достаточную жесткость естественной характеристики электродвигателя с параллельным возбуждением. На рисунке 34 это отражено небольшим наклоном линии 1.
Во время работы электродвигателя можно увеличить сопротивление реостата 1', тогда общее
сопротивление цепи якоря возрастает (наклон линии - характеристики увеличится). Таким образом, получают ряд искусственных реостатных характеристик 2, 3, 4.
Потери мощности в цепи возбуждения зависят от мощности электродвигателя. Номинальный ток якоря определяется как разность номинальных значений электрического тока электродвигателя и тока возбуждения. Однако ток возбуждения электродвигателя параллельного возбуждения мал, и в расчетах его часто не учитывают.
Шунтовые электродвигатели кратковременно могут работать с перегрузкой. Коэффициент допустимой перегрузки Я = 2-н2,5. Величина допустимой кратковре-. менной перегрузки ограничивается появлением значительного искрения под щетками.
На рисунке 52 штриховой линией 9 показана механическая характеристика, соответствующая измененной полярности якоря электродвигателя, при которой изменяется направления действия момента в двигательном режиме.
 Пуск двигателя с параллельным возбуждением производят только с помощью пускового реостата. Реостат 1' (рисунок 34) при пуске включается полностью всеми ступенями, тем самым разгоняя электродвигатель по характеристике 4. Сопротивления рассчитывают так, чтобы электродвигатель при включении развивал заранее заданный момент mi (обычно mi =2MH). При разгоне электродвигателя, когда момент уменьшается до заранее принятого значения М2 (М2 =МН), одну секцию реостата отключают. Электродвигатель при той же скорости переходит на работу по характеристике 3. Секции реостата постепенно отключают, пока электродвигатель не перейдет на работу по естественной механической характеристике. Пуск электродвигатель постоянного тока в станках производится автоматически.
Пуск двигателя с параллельным возбуждением производят только с помощью пускового реостата. Реостат 1' (рисунок 34) при пуске включается полностью всеми ступенями, тем самым разгоняя электродвигатель по характеристике 4. Сопротивления рассчитывают так, чтобы электродвигатель при включении развивал заранее заданный момент mi (обычно mi =2MH). При разгоне электродвигателя, когда момент уменьшается до заранее принятого значения М2 (М2 =МН), одну секцию реостата отключают. Электродвигатель при той же скорости переходит на работу по характеристике 3. Секции реостата постепенно отключают, пока электродвигатель не перейдет на работу по естественной механической характеристике. Пуск электродвигатель постоянного тока в станках производится автоматически.
Регулирование частоты вращения электродвигателей постоянного тока можно производить тремя способами: изменением сопротивления в цепи якоря, изменением подводимого к электродвигателю напряжения и магнитного потока, первый способ малоэко-
номичен и применяется редко.
Регулирование скорости изменением магнитного потока является наиболее распространенным. Величина потока изменяется реостатом 2' (рисунок 34). Увеличивая его сопротивление, уменьшают ток возбуждения и магнитный поток, что приводит к увеличению частоты вращения. При этом возрастают как скорость холостого хода, так и угловой коэффициент. Таким образом, при уменьшении магнитного потока механические характеристики представляют собой ряд прямых линий (5, 6, 7, 8), не параллельных естественной характеристике и имеющих тем больший наклон, чем меньше потокам они соответствуют. Число их зависит от количества секций на реостате Т'. При большом числе секций на регулировочном реостате частота вращения практически регулируется бесступенчато.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
