

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Качающийся упор применяется в том случае, когда все позиции в револьверной головке заняты режущими инструментами. Качающийся упор имеет меньшую жесткость, чем упор, устано вленный в револьверной головке. Поэтому при его применении для обработки точных деталей подрезают торец заготовки. Справа на валу XVI установлены дисковые кулачки 18, 19, для подачи вертикальных 22 и 23 суппортов, а кулачки 20, 21 - поперечных 24 и 25.
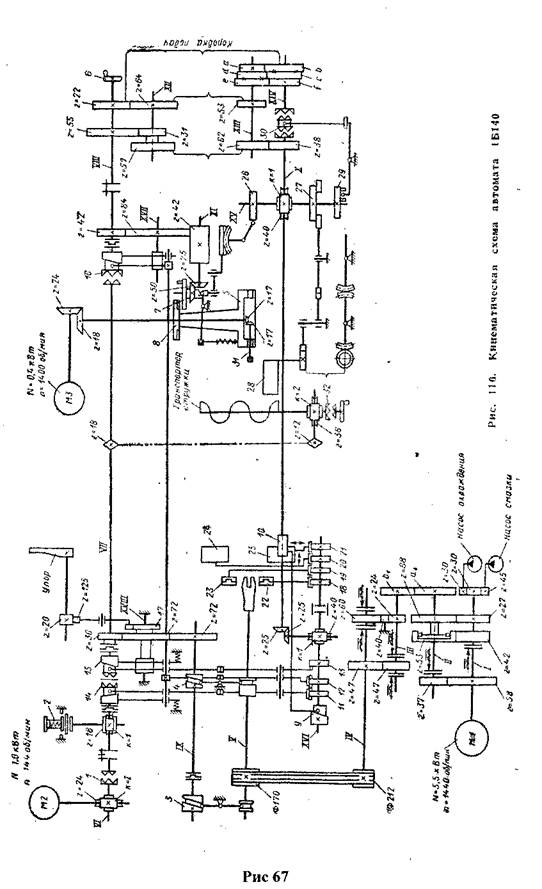
На распределительном валу XV расположёны: дисковый кулачок 26 для подачи револьверного суппорта, барабан 27, управляющий приемником
готовых деталей 28, и барабан 29, переключающий с помощью муфты 30 распределительные валы с медленного вращения на быстрое и наоборот. Медленное вращение распределительных валов осуществляется от вала VIII
через передачу![]() и сменные зубчатые колеса
и сменные зубчатые колеса![]() (муфта 30 включена
(муфта 30 включена
вправо).
Кинематические цепи привода вращения специальных приспособлений. Вращение быстросверлильного приспособления осуществляется от самостоятельного электродвигателя МЗ. Вращение через
конические зубчатые колеса ![]() и
и ![]() передается на шпиндель 31
передается на шпиндель 31
быстросверлильного приспособления, установленный в одной из позиций револьверной головки. Этот шпиндель, вращаясь в направлении, обратном вращению заготовки, позволяет получать высокие скорости резания при сверлении отверстий малого диаметра.
Винтовой транспортер удаления стружки получает вращение от
вспомогательного вала VII через цепную передачу![]() и червячную пару
и червячную пару
(муфта 32 включается вручную).![]()
Суппорт револьверной головки. Револьверная головка в процессе работы получает следующие движения: продольное перемещение справа налево (быстрый подвод и рабочая подача), быстрый отвод в исходное положение и переключение с одной позиции на другую. Продольное перемещение осуществляется от кулачка 49 (рис. 68), профиль которого соответствует технологическому про-
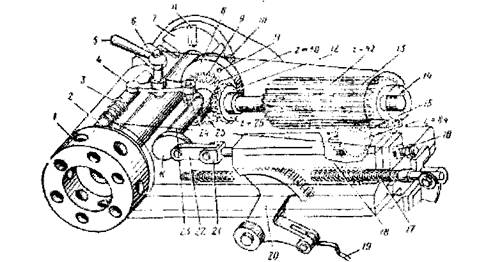
Рис. 68. Схема суппорта револьверной головки
цессу обрабатываемой детали. Выступы кулачка, поднимая ролик рычага с зубчатым сектором 20, через рейку 18, связанную тягой 21 и шатуном 22 с кривошипным валом 23, сообщают движение револьверной головке / и ее корпусу. Корпус револьверной головки находится под постоянным действием пружины 17, стремящейся сдвинуть его вправо. Когда ролик, скатываясь с выступа, попадает во впадину кулачка 19, пружина отводит корпус револьверной головки вправо на расстояние, соответствующее глубине этой впадины.
Револьверная головка поворачивается от вспомогательного вала через зубчатые колеса 15 (z = 84) я 13 (z = 42), вал 14, конические колеса 12 и 9 с
передаточным отношением![]() , кривошипный вал 23 с диском 8 (на диске
, кривошипный вал 23 с диском 8 (на диске
имеется палец 11с роликом 10) и мальтийский крест 7 с шестью радиальными пазами а. Крест установлен на конце оси револьверной головки /. При вращении кривошипного вала 23 ролик, 10 входит в очередной паз мальтийского креста и поворачивает его на 1/6 часть оборота вместе с револьверной головкой.
В рабочем положении револьверную головку удерживает фиксатор 2. Механизм фиксации состоит из пружины 3, кулачка 25 и рычага 4 с роликом 24. Когда кулачок 25, связанный с кривошипным валом 23, нажимает на ролик 24, рычаг 4 поворачивается на оси 6, и, преодолевая сопротивление пружины 3, вытягивает фиксатор 2 из гнезда револьверной головки 1. После поворота револьверной головки в другую позицию профиль кулачка 25 позволяет фиксатору 2 под действием пружины 3 войти в очередноегнездо револьверной головки и зафиксировать ее в этом положении. Рукоятка 5 служит для ручного отвода фиксатора.
Чтобы при повороте револьверной головки в другую позицию не повредить режущие инструменты и обрабатываемую деталь, перед каждым поворотом головки револьверный суппорт быстро отводят назад. Это осуществляется следующим образом. При вращении кривошипного вала 23, еще до того как ролик 10 дойдет до радиального паза а мальтийского креста 7 и начнется поворот револьверной головки, револьверный суппорт под действием кривошипа К и шатуна 22 быстро отойдет назад. По окончании поворота головки револьверный суппорт под действием кривошипа К займет первоначальное положение, при котором весь кривошипно-шатунный механизм представляет собой одну жесткую систему (как показано на рис. 68). Положение револьверного суппорта
|
откуда или
или![]()
Храповая муфта Л1 предназначена для выключения вращения кулачка /С при быстром обратном ходе продольного суппорта и для останова кулачка при отведенном положении затыловочного суппорта.
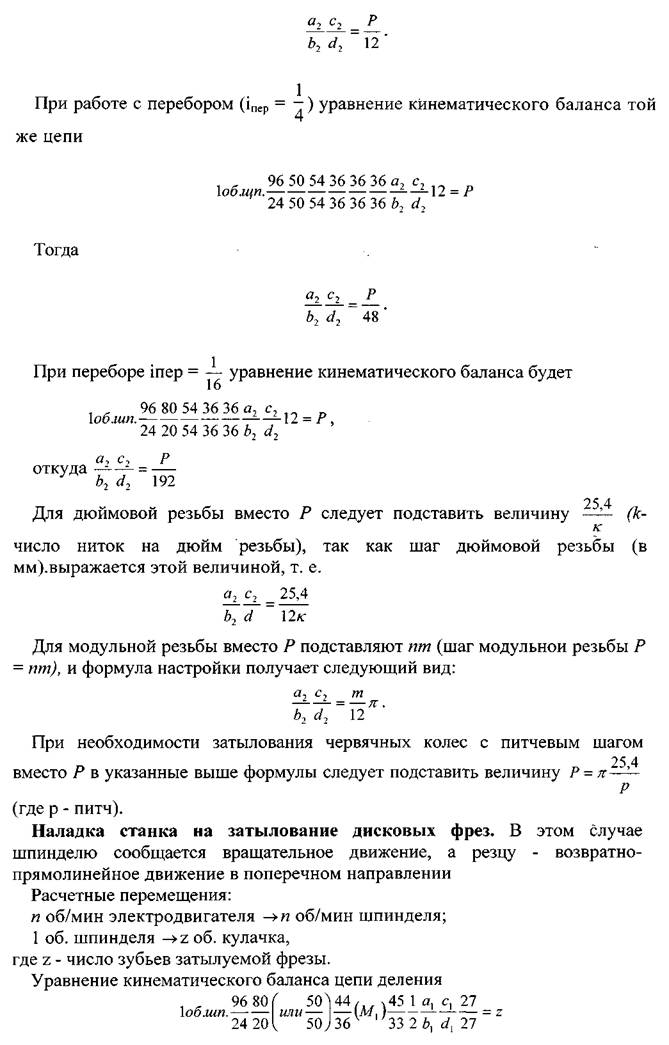
Наладка станка на затылование цилиндрических фрез с прямыми канавками. Расчетные перемещения 'конечных звеньев:
п об/мин электродвигателя -» п об/мин шпинделя;
1 об. Шпинделя -»2 об. кулачка;
1 об. шпинделя —»s мм продольного перемещения резца. Наладку главного движения и движения цепи деления производят аналогично наладке на затылование дисковых фрез. Продольная подача инструмента осуществляется от ходового вала.
Наладка станка на затылование цилиндрических фрез с винтовыми канавками. Расчетные перемещения конечных звеньев:
п об/мин электродвигателя -»п об/мин шпинделя;
1 об. Шпинделя -> s мм продольного перемещения резца.
-> s мм продольного перемещения резца.
В этом случае необходимо выполнить все наладочные расчеты, как при
наладке на затылование цилиндрических фрез с прямыми канавками, и
дополнительно произвести наладку цепи дифференциала, т. е. сообщить
кулачку дополнительное вращение. Это осуществляется от ходового вала или
ходового винта через сменные колеса гитары дифференциала![]() . Расчет
. Расчет
при наладке станка на дополнительное вращение кулачка ведется при условии, что при воображаемом перемещении суппорта на длину шага винтовой канавки Т кулачок совершает дополнительно ±z оборотов. Знак плюс соответствует увеличению числа двойных ходов резца, знак минус уменьшению этого числа. При различных направлениях винтовых линий червячной нарезки и продольной винтовой канавки берут знак плюс, при одноименных - знак минус. В последнем случае на гитаре дифференциала необходимо установить паразитное зубчатое колесо. Иначе говоря, необходимо, чтобы за один оборот шпинделя (заготовки) кулачок
дополнительно получил![]() оборотов при подаче от ходового вала или
оборотов при подаче от ходового вала или
![]() оборотов при подаче от ходового винта. Для этого в станке предусмотрена
оборотов при подаче от ходового винта. Для этого в станке предусмотрена
цепь дифференциала.
При затыловании цилиндрических фрез с винтовыми канавками муфту М3 и гайку ходового винта выключают, а муфту М5 и тройной блок на валу XX (см. рис. 100) включают; при этом продольная подача суппорта происходит с помощью ходового вала.
Учитывая, что один оборот шпинделя соответствует s мм продольного перемещения суппорта с резцом, расчётные перемещения цепи дифференциала будут иметь вид
s мм продольного перемещения суппорта![]() оборотов кулачка.
оборотов кулачка.
Уравнение кинематического баланса цепи дифференциала для этого случая
|
относительно торца шпинделя можно менять путем изменения положения тяги 21 в ползуне-рейке 18 ввертыванием или вывертыванием резьбовой втулки 16, которая связана с тягой 21.
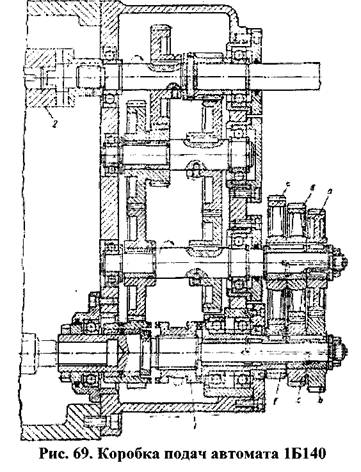
Коробка подач (рис. 69) у автомата 1Б140 закреплена на правом торце станины и получает вращение от вспомогательного вала через крестовую муфту 2. В зависимости от положения зубчатой муфты 1 коробка подач передает на распределительные валы медленное (рабочее) или быстрое вращение на холостом ходу.
Поперечный распределительный вал 2 (рис. 70) несет на себе кулачок 1 подачи револьверного суппорта, который устанавливают с передней стороны автомата через прозрачную откидную крышку 3, т. е. у этого автомата имеется свободный доступ к кулачку револьверного суппорта.
Продольный распределительный вал 1 (рис. 71) в этом автомате является более удобным с точки зрения наладки. Участок этого вала с дисковыми кулачками подачи поперечных суппортов является съемным. Для его снятия необходимо расстопорить винт 4, вывернуть стяжной винт 3, одновременно выдвигая вправо

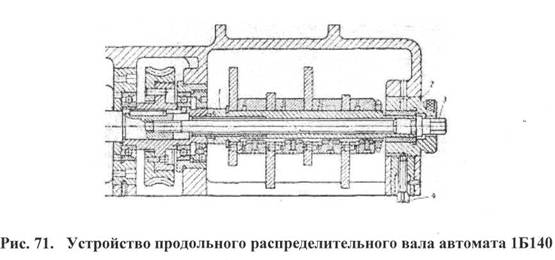
втулку 2. Чтобы снятию вала не мешали рычаги с роликами, их поднимают вверх и стопорят. Подъем рычагов осуществляется специальным механизмом, состоящим из червяка и неполного червячного колеса.
Поперечные суппорты получают поступательное движение в сторону оси шпинделя от рычагов с зубчатыми секторами 4 (рис. 72), связанными с зубчатыми рейками 3, а установочное перемещение при настройке - от винтов 5 и 6. На переднем суппорте имеются продольные направляющие 1, по которым перемещается параллельно оси шпинделя или под углом к нему продольный суппорт 2. Рабочее движение суппорты получают от кулачков, установленных на распределительном валу автомата.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
