

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
|
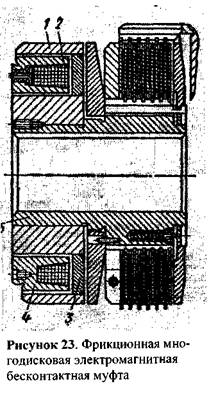
На рисунке 23 показана фрикционная многодисковая бесконтактная электромагнитная муфта. Она отличается от рассмотренной выше контактной муфты в основном отсутствием скользящих контактов. Катушка 2 смонтирована в катушкодержателе 4, который центрируют и закрепляют отдельно. На втулке 5 закреплен сварной корпус 1, который состоит из внешнего и внутреннего колец, соединенных между собой диском 3 из немагнитной стали.
Предохранительные муфты предназначены для предохранения механизмов станка от аварий при перегрузках. У муфт, показанных на рисунке 21, зим, предохраняющим звеном является штифт 1, сечение которого рассчитывается на передачу определенного крутящего момента. При перегрузках этот штифт срезает-
ся, происходит разрыв соответствующей кинематической цепи и тем самым предотвращается повреждение ответственных деталей станка.
|
Муфты обгона. В станках часто бывает необходимо одному и тому же валу сообщать два различных движения (медленное - рабочее и быстрое - холостое), которые осуществляются по двум отдельным кинематическим цепям. Чтобы включить цепь быстрого хода, не выключая цепи рабочего движения, применяют муфты обгона.
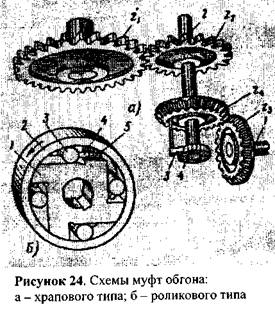
В качестве муфт обгона можно использовать храповые механизмы (рисунок 24, а). Вал 2 вращается от вала 1 через конические колеса![]() и храповой механизм (колесо z4
и храповой механизм (колесо z4
свободно посажено на валу 2). Если одновременно включить цепь быстрого хода через передачу, то вал 2 вместе с храповым колесом
4 будет![]() вращаться быстрее зубчатого колеса z4 и собачка 3 будет проскальзывать. На рисунке 24, б показана муфта обгона роликового типа. Она состоит из закрепленного на валу корпуса (звездочки) 1, наружного кольца или втулки 2, связанной или составляющей одно целое с зубчатым или червячным колесом, шкивом и т. п., и нескольких роликов 3, помещенных в вырезах корпуса 1. Каждый из роликов отжимается одним - тремя, в зависимости от длины ролика, штифтами 4 с пружинами 5 в направлении к узкой части выемки между деталями 1 и 2. Если, например, ведущей частью является втулка 2, то при вращении ее в сторону, указанную стрелкой, ролики увлекаются трением в узкую часть выемки и заклиниваются между втулкой и корпусом муфты. Поэтому в этом случае корпус 1 и связанный с ним вал будут вращаться с угловой скоростью втулки 2. Если при продолжающемся движении втулки 2 против часовой стрелки валу и корпусу 1 сообщить движение по другой кинематической цепи, направленное в ту же сторону, только имеющее скорость, боль-
вращаться быстрее зубчатого колеса z4 и собачка 3 будет проскальзывать. На рисунке 24, б показана муфта обгона роликового типа. Она состоит из закрепленного на валу корпуса (звездочки) 1, наружного кольца или втулки 2, связанной или составляющей одно целое с зубчатым или червячным колесом, шкивом и т. п., и нескольких роликов 3, помещенных в вырезах корпуса 1. Каждый из роликов отжимается одним - тремя, в зависимости от длины ролика, штифтами 4 с пружинами 5 в направлении к узкой части выемки между деталями 1 и 2. Если, например, ведущей частью является втулка 2, то при вращении ее в сторону, указанную стрелкой, ролики увлекаются трением в узкую часть выемки и заклиниваются между втулкой и корпусом муфты. Поэтому в этом случае корпус 1 и связанный с ним вал будут вращаться с угловой скоростью втулки 2. Если при продолжающемся движении втулки 2 против часовой стрелки валу и корпусу 1 сообщить движение по другой кинематической цепи, направленное в ту же сторону, только имеющее скорость, боль-
шую по величине, чем скорость втулки 2, то ролики переместятся в широкую часть выемки и муфта окажется расцепленной. При этом детали 1 и 2 будут вращаться каждая со своей скоростью.
Ведущим элементом может быть любая из деталей 1 и 2. Если ведущим является корпус, то муфта сцепляется при его вращении по часовой стрелке, или когда он, вращаясь в том направлении, опережает втулку.
РЕВЕРСИВНЫЕ МЕХАНИЗМЫ
Направление движения в механизмах станков можно изменять с помощью различных механических, электрических устройств. Наиболее часто применяют реверсивные механизмы с цилиндрическими и коническими колесами.
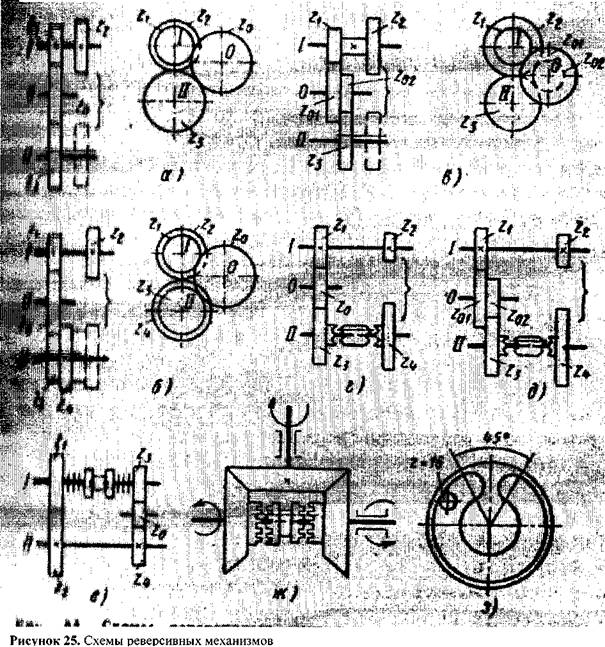
На рисунке 25, а-в показаны схемы реверсивных механизмов с передвижными зубчатыми колесами, а на рисунке 25, г-е - с неподвижными колесами и муфтами. Механизм с коническими зубчатыми колесами показан на рисунке 25, ж, где реверсирование производится двусторонней кулачковой муфтой. Направления движения показаны стрелками.
В некоторых деталях зубообрабатывающих станков применяют реверсивные механизмы, подобные изображенному на рисунке 25, з. Здесь при неизменном направлении вращения зубчатого колеса z=16 составное колесо получает возвратно-вращательное движение.
Гидравлическое реверсирование осуществляется изменением направления потока масла в рабочий цилиндр, чаще всего с помощью направляющих гидрораспределителей, электрическое реверсирование - путем изменения направления вращения электродвигателя привода.
ПЛАНЕТАРНЫЕ ПЕРЕДАЧИ
Планетарной называется передача, в которой оси некоторых колес являются подвижными. Звено, на котором установлены зубчатые колеса с подвижными осями, называется водидом. Зубчатые колеса, оси которых подвижны, называются сателлитами. При подвижном водиле сателлитами, вращаясь вокруг своих осей, в то же время вращаются вместе с ними. Этим они напоминают движение планет, откуда и произошел термин «планетарные механизмы» или «планетарные передачи».
Неподвижная ось, около которой вращается или может вращаться водило, называется основной осью. Сцепляющиеся с сателлитами зубчатые колеса, оси которых совпадают с основной осью, называются центральными колесами. При неподвижном водиле планетарная передача превращается в простую передачу. Планетарные механизмы, в которых подвижны все три основные звена, называются дифференциальными передачами или дифференциалами.
Планетарные передачи позволяют получать широкий диапазон передаточных отношений (особенно больших передаточных отношений) и осуществлять сложение движений (алгебраическое). К достоинствам планетарных передач относятся малые размеры и масса, незначительные потери на трение. Переход от обычных передач к планетарным обеспечивает уменьшение массы в 1,5 - 5 раз.
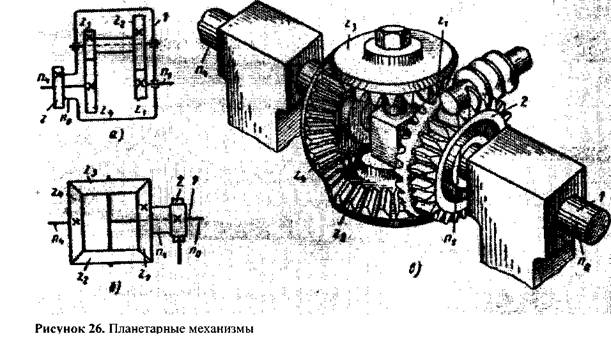
Планетарная передача с цилиндрическими колесами. Показанная на рисунке 26, а схема механизма является примером планетарной передачи с цилиндрическими колесами. У этой передачи зубчатые колеса ъ\ и z2 являются централь-
ными, z3 и z4 - сателлитами, а звено 1 - водилом. Передача обладает возможностью передавать движение семью различными способами:
1) вал п1 - ведущий, п4 - неподвижный, водило п0 - ведомое;
2) вал п1 - ведомый, п4 - неподвижный, водило п0 - ведущее;
3) вал п1 — ведущий, п4 — ведомый, водило По — ведущее;
4) вал п1 - ведомый, п4 - ведущий, водило п0 - ведущее;
5) вал п1 - неподвижный, п4 - ведущий, водило п0 - ведомое;
6) вал п1 - неподвижный, п4 - ведомый, водило п0 - ведущее;
7) вал п1 - ведущий, п4 - ведущий, водило п0 - ведомое.
Подобная планетарная передача применена, например, на горизонтально-расточном станке 2620В для осуществления радиальной подачи суппорта планшайбы. Ведущими у нее являются водило 1 и вал с зубчатым колесом zb а ведомым - колесо z4.
Для определения частоты вращения валов планетарной передачи используют формулу Виллиса
где m - число наружных зацеплений (для нашего случая т=2).
По уравнению Виллиса находим следующее соотношение для указанных выше случаев:

Планетарная передача с коническими колесами показана на рисунке 26, б, в. Подобные передачи получили в станках широкое распространение. У этих передач из трех звеньев любые два могут быть ведущими, а третье - ведомым. Дифференциал состоит из центральных колес z\ и z4, сателлитов z2 и z3 и водила 1. Как правило, зубчатое колесо z4 вращается с большей частотой (основная), а колесо z\ -с меньшей (добавочная частота). Колесо z\ вращается от червячной пары 2.
Дифференциал может работать по следующим схемам: а) ведущим является колесо z4, а ведомым - водило; червячная пара неподвижна;
б) ведущим является водило, а ведомым - зубчатое колесо z4; червячная пара не
подвижна;
в) ведущим является колесо zb а ведомым - колесо z4; водило неподвижно;
г) одновременно с вращением водила вращается от червячной пары зубчатое коле
со Zj (ведомым является колесо z4);
д) ведущими являются колеса z1 и z4, а ведомым водило.
Передаточное отношение дифференциала для различных случаев можно определить, используя формулу Виллиса, имеющую для этой передачи следующий вид (так как z2=z3 и z\=Z4)'.
где п0 - частота вращения водила; п{ и п4 - соответственно частоты вращения зубчатых колес z\ и z4.
Знак минус перед единицей стоит по тому, что при неподвижном водиле колеса z, и z4 вращаются в разных направлениях.
Для случаев, указанных выше, формула Виллиса дает следующие соотноше-
ния:
в формулах знак плюс означает разные направления вращения ведущих звеньев дифференциала, а знак минус - одинаковые направления вращения.
ТОРМОЗНЫЕ УСТРОЙСТВА
|
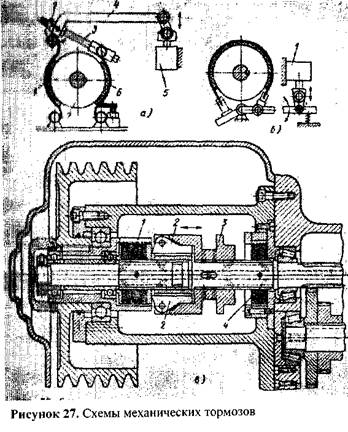
В металлорежущих станках тормоза применяют для остановки или замедления движения подвижных звеньев станка или отдельных его механизмов. Торможение может осуществляться механическими, электрическими, гидравлическими и пневматическими средствами, или в комбинации одно с другим (здесь рассмотрены только механические тормоза). Основным видом механических тормозов являются ленточные, колодочные и многодисковые тормоза, которые часто блокируют с пусковыми муфтами так, что при выключении муфты включается тормоз. Устанавливают тормоза в основном на быстроходных валах коробок скоростей станков. У колодочного тормоза (рисунок 27, а) колодки 1 и 6 соединены

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
