

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
где d] и d2 - диаметры соответственно ведущего и ведомого шкивов.
Скольжение ремня учитывают поправочным коэффициентом, который равен 0,97-0,985.
|
|
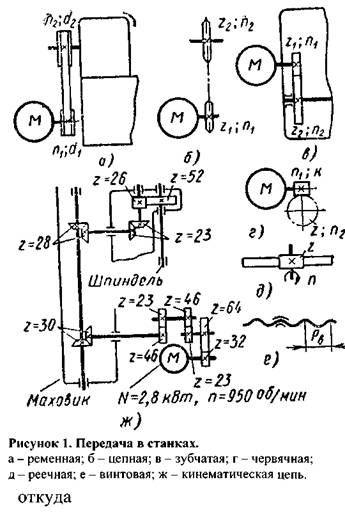
Цепная передача. Передаточное отношение (рисунок 1 ,б)
|
откуда
где Zi и z2 - числа зубьев соответственно ведущей и ведомой звездочек. Зубчатая передача, (рисунок 1, в), осуществляемая цилиндрическими или коническими зубчатыми колесами. Передаточное отношение
![]()
откуда
![]()
где Zi и z2 - числа зубьев соответственно ведущего и ведомого зубчатых колес.
Червячная передача. Передаточное отношение (рисунок 1, г)
|
![]()
где k - число заходов червяка; z - число зубьев червячного колеса.
Реечная передача. Длина прямолинейного перемещения рейки за один оборот реечного зубчатого колеса (рисунок 1, д)
L=zP=z7rm,
Где Р=пm - шаг зуба рейки, мм; z - число зубьев реечного зубчатого колеса; m - модуль зубьев реечного зубчатого колеса, мм.
Винт и гайка. Перемещение гайки за один оборот винта (рисунок 1, е)
L=kPB, Где k - число заходов винта; Рв - шаг винта, мм.
ПЕРЕДАТОЧНЫЕ ОТНОШЕНИЯ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ. РАСЧЕТ ЧАСТОТЫ ВРАЩЕНИЯ И КРУТЯЩИХ МОМЕНТОВ.
Для определения общего передаточного отношения кинематической цепи (рисунок 1, ж) необходимо перемножить между собой передаточные отношения отдельных передач, входящих в эту кинематическую цепь:
 Частота вращения последнего ведомого вала равна частоте вращения ведущего вала, умноженной на общее передаточное отношение кинематической цепи:
Частота вращения последнего ведомого вала равна частоте вращения ведущего вала, умноженной на общее передаточное отношение кинематической цепи:
т. е.
Крутящий момент на шпинделе Мшп зависит от величины передаточного отношения кинематической цепи от электродвигателя к шпинделю. Если электродвигатель развивает момент Мдв, то
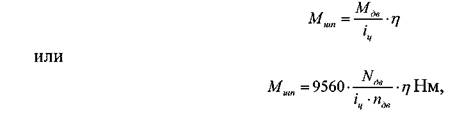
где 1Ц - передаточное отношение кинематической цепи от электродвигателя к шпинделю; Кдв и пдв - соответственно мощность (в кВт) и частота вращения(в об/мин) вала электродвигателя; г] — механический КПД кинематической цепи от электродвигателя к шпинделю.
РЯДЫ ЧАСТОТ ВРАЩЕНИЯ ШПИНДЕЛЕЙ, ДВОЙНЫХ ХОДОВ И РЯДЫ ПОДАЧ В СТАНКАХ.
У станков с вращательным главным движением частоту вращения шпинделя в минуту определяют по форму![]()
где v - скорость резания, м/мин; d - диаметр ле обрабатываемой заготовки или инструмента, мм.
С целью получения наивыгоднейших условий при обработке заготовок из различных материалов инструментами с различными режущими свойствами станки должны обеспечивать изменение скоростей резания от vmin до vmax.
Так как обрабатываемые заготовки или устанавливаемые на станке инструменты могут иметь диаметры от dmin до dmax, необходимо иметь возможность устанавливать различную частоту вращения шпинделя от nmin до nmax:
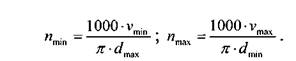
Отношение максимальной частоты вращения шпинделя станка к минимальной называется диапазоном регулирования частоты вращения шпинделя:
![]()
|
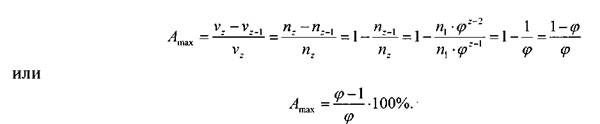
которая меньше расчетной на величину у-уд. Тогда относительная потеря скорости резания при переходе с одной частоты вращения к ближайшей меньшей |
Диапазон регулирования шпинделя характеризует эксплуатационные возможности станка. В указанных пределах можно получить любое значение п, если иметь механизм бесступенчатого регулирования скорости главного движения. В этом случае можно установить частоту вращения, соответствующую выбранной наивыгоднейшей скорости резания при заданном диаметре. Однако, бесступенчатые приводы, несмотря на их довольно значительное распространение в современных станках, применяют не так широко, как приводы со ступенчатым рядом частоты вращения шпинделя. Подавляющее большинство станков имеет ступенчатые ряды частот вращения; в этом случае вместо частоты вращения, точно соответствующей наивыгоднейшей скорости резания при данном диаметре, приходится брать ближайшую меньшую частоту. Этой действительной частоте пд будет соответствовать действительная скорость резания
Следовательно, относительная потеря скорости резания будет тем меньше, чем меньше разность п-пд.
max |
В интервале между предельными значениями частоты вращения nmin и п
промежуточные частоты можно разместить по различным рядам. Однако не все возможные ряды будут равноценными. Наиболее рациональным для применения в станкостроении является геометрический ряд, в котором каждая последующая частота отличается от предыдущей в ф раз (ф - знаменатель ряда).
Целесообразность распределения частот вращения шпинделей в станках по геометрическому ряду была впервые доказана в 1976г. академиком -ным. Главным преимуществом геометрического ряда является то, что максимальная относительная потеря скорости резания остается одинаковой для всех интервалов ряда частоты вращения. Это позволяет обеспечить постоянство максимальной относительной потери производительности формообразования станка, т. е. дает экономические преимущества по сравнению с другими рядами. Производительность формообразования определяется площадью поверхности, обрабатываемой на станке за единицу времени.
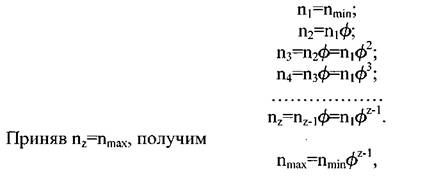
Геометрический ряд частоты вращения со знаменателем ф будет иметь вид:
|
|

где z - число ступеней ряда.
Значения знаменателей рядов ф нормализованы, что позволяет нормализовать ряды частот вращения и подач, а также облегчать кинематический расчет станков. Значение знаменателей ф нормальных рядов частот вращения шпинделей станков установлены с учетом ряда соображений.
1. В приводе главного движения станков часто применяют многоскорост
ные электродвигатели трехфазного тока с отношением частот вращения равным 2.
Для того чтобы частоты вращения шпинделя, получаемые при разных частотах та
ких электродвигателей, были членами геометрического, необходимо иметь
 где Е] - целое число.
где Е] - целое число.
![]() 2. Обязательно должен быть учтен ГОСТ 8032-56 «Предпочтительные числа и
2. Обязательно должен быть учтен ГОСТ 8032-56 «Предпочтительные числа и
ряда предпочтительных чисел». Ряды предпочтительных чисел построены в виде
геометрических прогрессий, знаменатели которых должны удовлетворять требова
нию
где Е2 - целое число.
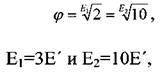 Таким образом, стандартные значения знаменателя ф рядов частоты вращения шпинделей могут быть найдены из условия
Таким образом, стандартные значения знаменателя ф рядов частоты вращения шпинделей могут быть найдены из условия
откуда
где Е' - произвольное целое число.
 Для предусмотренных ГОСТ 8032-56 четырех значений Е2=40; 20; 10 и 5, которым соответствуют Е'=Е2/10=4; 2; 1 и 0,5 и Ei=3E'=12; 6; 3 и 1,5, получают следующие значения ф
Для предусмотренных ГОСТ 8032-56 четырех значений Е2=40; 20; 10 и 5, которым соответствуют Е'=Е2/10=4; 2; 1 и 0,5 и Ei=3E'=12; 6; 3 и 1,5, получают следующие значения ф
Для практики станкостроения указанных четырех значений оказалось недостаточно, поэтому добавлены
Вследствие того, что знаменатель ф связан с числом 2 через определенное число членов ряда, каждое число увеличивается в 2 раза. Если, например, в ряде имеется число 2, то будут числа 4, 8, 16 и т. д. Этой закономерности не подчиняются ряды с ф=1,58 и ф=\,78.
В связи с тем, что ф связан с числом 10, каждое число ряда увеличивается через определенное число членов ряда в 10 раз. Например, при наличии в ряде числа 2,8 встретятся также числа 28, 280, 2800 и т. д. Эта закономерность десятичного повторения чисел не распространяется на ряды с ф=1,41 и ф=2.
Ниже приведены значения максимальной относительной потери скорости резания Атах между двумя соседними частотами вращения для соответствующих значений ф=1,06; 1,12; 1,26; 1,41; 1,58; 1,78; 2 Атах=5; 10; 20; 30; 40; 45; 50%.
|
В таблице 3 приведены нормальные ряды частот вращения в станкостроении ( нормаль станкостроения HI 1-1).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
