

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Кулачковые механизмы, преобразующие вращательное движение в прямолинейное поступательное, применяют главным образом в автоматах. Различают кулачковые механизмы с плоскими и цилиндрическими кулачками.
|
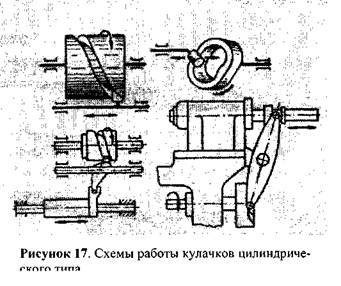
На рисунке 16, а показана схема механизма с плоскими кулачками. При вращении кулачка 1 через ролик 2, рычажную передачу и зубчатый сектор движение передается с помощью рейки суппорту, который совершает возвратно-поступательное движение в соответствии с профилем кулачка. На рисунке 17 показан принцип работы цилиндрических кулачков.
Устройства для малых перемещений. В тех случаях, когда жесткость обычных механизмов типа реечной или винтовой пары не обеспечивает точные перемещения (т. е. когда медленное перемещение узла переходит в скачкообразное с периодически чередующимися остановками и скачками), применяют специальные устройства, работающие без зазоров и обеспечивающие высокую жесткость привода. К таким устройствам относятся термодинамический, магнитострикционный приводы и привод с упругим звеном.
Схема термодинамического привода (рисунок 18, а) представляет собой жесткий полый стержень, один конец которого крепят к неподвижной части станка (станине), а другой соединяют с подвижным узлом. При нагревании стержня посредством спирали или при пропускании электрического тока малого напряжения и большой силы непосредственно через него стержень удлиняется на величину Alt, перемещая подвижный узел станка. Для возврата подвижного узла в начальное положение необходимо стержень охладить.
|
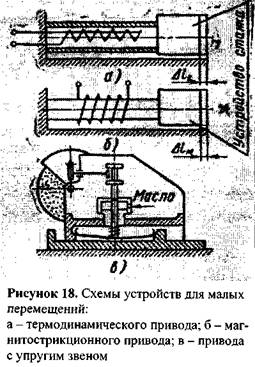
Магнитострикционный привод (рисунок 18, 6) работает следующим образом. Стержень, изготовленный из магнитострикционного материала, помещают в магнитное поле, напряженность которого можно менять. Увеличивая или уменьшая напряженность магнитного поля, тем самым изменяют длину стержня на величину А1М. Различают положительную магнитострикцию (когда с увеличением магнитного поля размеры стержня увеличиваются) и отрицательную (с увеличением напряжения магнитного поля размеры стержня уменьшаются). Это зависит от материала стержня.
Привод с упругим звеном (рисунок 18, в) позволяет получать малые перемещения за счет упругого звена типа рессоры или плоской пружины. В нашем случае рессора предварительно нагружается жидкостью из гидросистемы. Затем по мере свободного истечения масса из цилиндра через выпускаемое отверстие малого сечения рессора выпрямляется и свободным концом перемещает шлифовальную бабку.
Рассмотренные приводы находят применение в прецизионных станках, где необходимо обеспечить высокую равномерность малых подач и точность малых периодических перемещений.
ХРАПОВЫЕ И МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
|
Храповые и мальтийские механизмы относятся к числу механизмов, осуществляющих прерывистое движение.
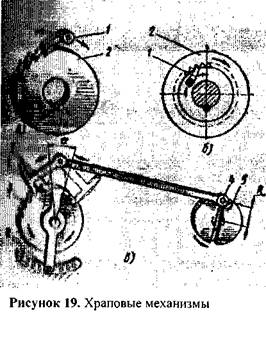
Храповые механизмы могут быть с наружным и внутренним зацеплением. В механизме с наружным зацеплением (рисунок 19, а) собачке 1 сообщается качательное движение. При движении справа налево собачка через зубья храпового колеса 2 поворачивает его на некоторый угол. При обратном ходе собачка проскальзывает по зубьям храпового колеса, не вращая его. В храповом механизме с внутренним зацеплением (рисунок 19, 6) вал с жестко посаженным на нем диском, к которому прикреплена собачка 1 имеет колебательное движе-
ние, и собачка, вращаясь слева направо поворачивает храповое колесо 2; когда собачка движется в обратном направлении, храповое колесо не вращается.
На рисунке 19, в показана схема привода храпового механизма. Качательное движение собачка 1 получает через шатун от ведущего кривошипного диска 5 с пальцем 4. Изменение положения пальца 4 в пазу (т. е. радиуса R) позволяет регулировать угол поворота а собачки 1 и тем самым угол поворота храпового колеса 2 за один оборот ведущего диска 5. Движение храпового колеса реверсируется переводом собачки в положение, показанное тонкой линией.
Изменять угол поворота храпового колеса при неизменном положении кривошипного пальца 4 можно щитком 3, который закрывает часть зубьев храпового колеса, и собачка в начальный период движения скользит по его поверхности, а затем, сходя с него, захватывает зубья храпового колеса и поворачивает. Щиток в выбранном положении удерживается фиксатором 6.
Мальтийские механизмы чаще всего применяют для периодического поворота на постоянный угол револьверных головок, шпиндельных блоков, столов многошпиндельных автоматов и т. д.
|

Мальтийские механизмы бывают правильные и неправильные. У правильных механизмов крест имеет пазы с равномерным шагом, у неправильных механизмов углы между смежными пазами креста различные. В станках применяют, как правило, правильные мальтийские механизмы с внешним зацеплением и радиальными пазами. В мальтийском механизме (рисунок 20) при вращении кривошипа цевка или ролик заходит в паз креста и за каждый оборот поворачивает его на Vz часть (z - число пазов), т. е. передаточное отношение мальтийского механизма i=Vz; обычно z=3-^8.
Основные соотношения параметров мальтийского механизма:
где а - половина центрального угла кривошипа за период поворота креста на угол (3; /3 - половина шагового угла между соседними пазами угла.
Если решить эти уравнения относительно 2о, то центральный угол рабочего поворота кривошипа
отсюда определяем значение центрального угла холостого хода кривошипа
где tp - время поворота креста; tx - время пребывания креста в покое.
При равномерном движении кривошипа (углы о,/3 и у выражены в радианах)
|

Правильное соотношение между размерами мальтийского механизма выражается следующей зависимостью:
R=l-sinj3 = l-sinT/2.
Для того чтобы в начале поворота креста, когда цевка входит в зацепление, не было удара, начальная угловая скорость креста должна быть равна 0. иначе необходимо, чтобы /3+0=90°, т. е. цевка должна входить в паз креста в радиальном на-поавлении.
МУФТЫ
Муфты служат для постоянного или периодического соединения двух соосных валов и для передачи при этом вращения от одного вала другому. Различают муфты: постоянные, служащие для постоянного соединения валов; сцепные, соединяющие и разъединяющие валы во время работы; предохранительные, предотвращающие аварии при внезапном превышении нагрузок; муфты обгона, передающие вращения только в одном направлении.
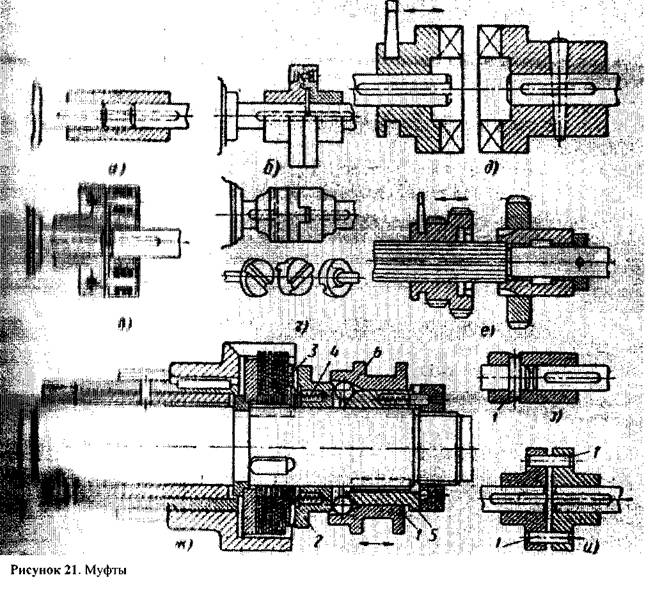
Постоянные муфты применяют в тех случаях, когда нужно соединить два вала, которые в процессе работы не разъединяются. При этом валы могут быть соединены жестко или с помощью упругих элементов (рисунок 21, а-г).
Сцепные муфты применяют для периодического соединения валов, напри-
|
мер, в приводе главного движения или подач станков.
В станках часто сцепные кулачковые муфты в виде дисков с торцевыми зубьями-кулачками (рисунок 21, д) и зубчатые муфты, устройство которых показано на рисунке 21, е. Недостатком изображенных сцепных муфт является то, что при больших разностях скоростей вращения ведущего и ведомого элементов муфты включить практически нельзя.
Фрикционные муфты имеют то же назначение, что и кулачковые, но они свободны от недостатка, присущего кулачковым муфтам, т. е. фрикционные муфты можно включать при любых разностях скоростей вращения элементов муфты. У фрикционных муфт при перегрузках ведомое звено может проскальзывать и тем самым предотвращать аварию. Наличие нескольких поверхностей трения дает возможность передавать значительные крутящие моменты при относительно малых величинах давления на поверхностях дисков.
Муфта работает следующим образом. При перемещении гильзы 1 влево шарики 6, находящиеся между коническими поверхностями гильзы 1 и неподвижной втулкой 5, давят на диск 2, который, в свою очередь, через упругую шайбу 3 сцепляет подвижные ведущие диски с ведомыми. Для включения муфты гильзу 1 отводят вправо и пружины 4 отжимают диск 2 в исходное положение.
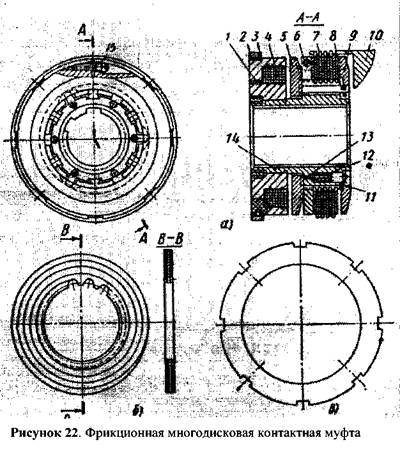
Общий вид фрикционной многодисковой контактной электромагнитной муфты показан на рисунке 22, а. Муфта имеет катушку 4 электромагнита, в которую подается постоянный электрический ток посредством контактных щеток, прижимаемых щеткодержателями к токопроводящим кольцам 2. Если кольцо одно, то один вывод катушки припаивают к нему, а второй - к корпусу 1 муфты, тогда контур тока замыкается через детали муфты и механизма станка. При наличии двух колец оба вывода катушки припаивают к кольцам. Когда в катушку 4 подается электрический ток, якорь 5 притягивается влево к корпусу 1 и с помощью тяг, проходящие через наружные пазы втулки 14, перемещает влево нажимной диск 9. Диск 9 сжимает пакет фрикционных дисков 8 и 7 и прижимает их к регулировочной гайке 6, которая стопорится винтом 15.
Внутренние диски (рисунок 22, 6) на обоих торцах имеют фрикционные ме-таллокерамические накладки, а также спиральные канавки одного направления для циркуляции масла. Наружные диски (рисунок 22, в) сцепляются с поводком 10 (рисунок 22, а), цилиндрический обод которого имеет пазы, и находится в свободном положении относительно наружной поверхности шлицев втулки 14. Подвижные штифты 13с пружинами 12 и шайба 11 служат для отвода вправо нажимного диска 9 и якоря 5 при отключении муфты. Цифрой 3 обозначена изоляционная втулка.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
