

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
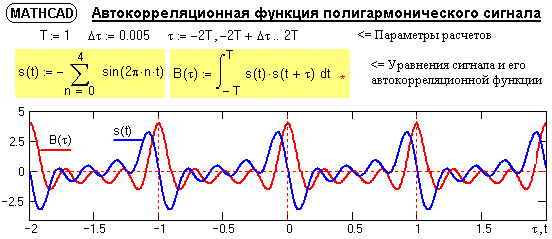
Рис. 17.31.
Отметим, что полученный результат не зависит от начальной фазы гармонического сигнала, что характерно для любых периодических сигналов и является одним из свойств АКФ.
Для сигналов, заданных на определенном интервале [a, b], вычисление АКФ производится с нормировкой на длину интервала
[a, b]:
Bs(τ) = s(t) s(t+τ) dt. (17.53)
s(t) s(t+τ) dt. (17.53)
Автокорреляция сигнала может оцениваться и коэффициентом автокорреляции, вычисление которого производится по формуле (по центрированным сигналам):
rs(τ) = cos φ(τ) = ⟨s(t), s(t+τ)⟩ /||s(t)||2.
Взаимная корреляционная функция (ВКФ) сигналов (cross-correlation function, CCF) показывает как степень сходства формы двух сигналов, так и их взаимное расположение друг относительно друга по координате (независимой переменной), для чего используется та же формула (17.51), что и для АКФ, но под интегралом стоит произведение двух разных сигналов, один из которых сдвинут на время τ:
B12(τ) =  s1(t) s2(t+τ) dt. (17.54)
s1(t) s2(t+τ) dt. (17.54)
При замене переменной t = t-τ в формуле (17.54), получаем:
B12(τ) =![]() s1(t-τ) s2(t) dt =
s1(t-τ) s2(t) dt =![]() s2(t) s1(t-τ) dt = B21(-τ)
s2(t) s1(t-τ) dt = B21(-τ)
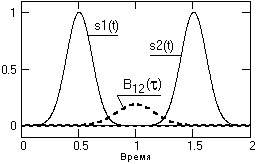
Рис. 17.32. Сигналы и ВКФ.
Отсюда следует, что для ВКФ не выполняется условие четности, а значения ВКФ не обязаны иметь максимум при τ = 0. Это можно наглядно видеть на рис. 17.32, где заданы два одинаковых сигнала с центрами на точках 0.5 и 1.5. Вычисление по формуле (17.54) с постепенным увеличением значений τ означает последовательные сдвиги сигнала s2(t) влево по оси времени (для каждого значения s1(t) для подынтегрального умножения берутся значения s2(t+τ)).
При τ=0 сигналы ортогональны и значение B12(τ)=0. Максимум В12(τ) будет наблюдаться при сдвиге сигнала s2(t) влево на значение τ=1, при котором происходит полное совмещение сигналов s1(t) и s2(t+τ). При вычислении значений B21(-τ) аналогичный процесс выполняется последовательным сдвигом сигнала s1(t) вправо по временной оси с постепенным увеличением отрицательных значений τ, а соответственно значения B21(-τ) являются зеркальным (относительно оси t=0) отображением значений B12(τ), и наоборот. На рис. 17.33 это можно видеть наглядно.
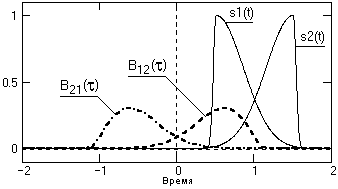
Рис. 17.33. Сигналы и ВКФ.
Таким образом, для вычисления полной формы ВКФ числовая ось τ должна включать отрицательные значения, а изменение знака τ в формуле (17.54) равносильно перестановке сигналов.
Для периодических сигналов понятие ВКФ обычно не применяется, за исключением сигналов с одинаковым периодом, например, сигналов входа и выхода систем при изучении характеристик систем.
Коэффициент взаимной корреляции двух сигналов вычисляется по формуле (по центрированным сигналам):
rsv(τ) = cos φ(τ) = ⟨s(t), v(t+τ)⟩ /||s(t)|| ||v(t)||. (17.55)
Значение коэффициента взаимной корреляции может изменяться от -1 до 1.
17.9. Математическое описание шумов и помех
Шумы и помехи (noise). При детектировании сигналов в сумме с основным информационным сигналом одновременно регистрируются и мешающие сигналы - шумы и помехи самой различной природы. К помехам относят также искажения информационных сигналов при влиянии различных дестабилизирующих факторов на процессы измерений, как, например, влияние микрокаверн в стенках скважины на измерения в рентгенорадиометрических методах каротажа, грозовых разрядов на электроразведочные методы измерений и т. п. Выделение информационных составляющих из зарегистрированных сигналов или максимальное подавление шумов и помех в информационном сигнале при сохранении его полезных составляющих является одной из основных задач первичной обработки сигналов (результатов наблюдений).
Если помехи известны и регулярны, как например, фон переменного тока, то борьба с ними особых затруднений не представляет. Наибольшие трудности представляет борьба со случайными (непредсказуемыми) помехами. В общей форме влияние помех на регистрируемый сигнал записывается в следующем виде:
y(t) = V(s(t), q(t)), (17.56)
где s(t) – информационная (полезная) часть сигнала, q(t) – помеха.
Помеха называется аддитивной, и обычно именуется шумом, если выражение (17.56) представляет собой простую сумму сигнала и помехи:
y(t) = s(t) + q(t). (17.57)
Если случайный процесс v(t), оказывающий влияние на сигнал, является неотрицательным, а его влияние выражается в форме:
y(t) = v(t)·s(t), (17.58)
то помеху v(t) называют мультипликативной.
В общем случае в сигнале могут присутствовать оба вида помех:
y(t) = v(t) s(t) + q(t). (17.59)
Природа помех. Как правило, случайные шумовые помехи (аддитивные) порождаются различного рода физическими флюктуациями – случайными отклонениями тех или иных физических величин от своих средних значений. Природа флюктуаций обычно определяется статистической природой физических процессов. Многие физические величины представляют собой результаты усреднения определенных параметров физических процессов, дискретных и случайных по своей природе. Так, например, тепловой шум регистрируемого напряжения на резисторах электрических цепей обуславливается флюктуациями теплового движения носителей зарядов - случайностью процесса дрейфа отдельных электронов по резистору, по суммарной интенсивности движения которых и формируется падение напряжения на резисторе. Дискретной является природа электромагнитных видов излучения – дискретный квант энергии излучения (фотон) определен значением hν, где h – постоянная Планка, ν - частота. Флюктуации физических величин, дискретных и случайных по своей природе, принципиально неустранимы, и речь может идти только о том, чтобы уменьшать их относительную величину имеющимися в нашем распоряжении средствами. Природа мультипликативных помех обычно связана с изменениями условий измерений, параметров каналов передачи данных и систем их обработки, т. е. когда случайные помехи накладываются не на сам сигнал непосредственно, а на системы, в которых этот сигнал формируется и обращается, вызывая опосредствованные искажения сигнала, как линейные, так и нелинейные.
Характеристики помех. В математическом описании помехи представляются случайными функциями времени. Случайную функцию непрерывного времени обычно называют случайным процессом, ее дискретный аналог – случайной последовательностью. Как правило, помехи относятся к классу стационарных случайных процессов, и характеризуются своими распределениями и моментами распределений, как их числовыми параметрами. Основное распределение большинства шумовых сигналов – нормальное (гауссов процесс). Это объясняется тем, что распределение сумм независимых случайных величин, из которых складываются случайные помехи, сходится к нормальному, вне зависимости от характера распределения слагаемых (теорема Ляпунова).
Момент первого порядка выражает среднее значение (постоянную составляющую) случайного процесса:
M{q} = ![]() =
=![]() q·p(q) dq. (17.60)
q·p(q) dq. (17.60)
где p(q) – плотность вероятностей значений q.
Центральный момент второго порядка определяет дисперсию процесса:
D{q} = σ2 =![]() (q-
(q-![]() )2·p(q) dq =
)2·p(q) dq = ![]() -
- ![]() 2. (17.61)
2. (17.61)
Дисперсия выражает мощность переменной составляющей процесса. Корень квадратный из значения дисперсии, т. е. значение σ, является средним квадратическим значением разброса случайных значений q относительно среднего значения ![]() .
.
Смешанный момент второго порядка называется функцией автокорреляции случайного процесса q(t):
M{q(t)q(t+τ)} =![]()
![]() x1x2·p(x1,x2) dx1 dx2 = B(τ). (17.62)
x1x2·p(x1,x2) dx1 dx2 = B(τ). (17.62)
Величина B(τ) при τ=0 равна общей мощности случайного процесса q(t).
На практике большинство случайных процессов обладают свойством эргодичности. Оно заключается в том, что средние значения по множеству реализаций (математические ожидания, вычисляемые по плотностям распределений (17.60-17.62)) совпадают со средними значениями по времени Т одной реализации процесса при Т ⇒ ∞. Это позволяет производить оценку числовых значений параметров помех непосредственно по произвольным интервалам [a, b] задания сигналов:
![]() =
= ![]() ≈
≈![]() q(t) dt. (17.63)
q(t) dt. (17.63)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
