

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
H(z) = H1(z)+H2(z)+...+HN(z).
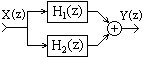
Рис. 21.9.
3. Соединение обратной связи. Выходной сигнал первой системы подается на выход системы и одновременно на вход системы обратной связи, выходной сигнал которой суммируется, со знаком плюс или минус в зависимости от вида связи (отрицательной или положительной), с входным сигналом первой системы. Эквивалентная передаточная функция общей системы: H(z) = H1(z)/(1±H1(z)H2(z)).
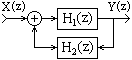
Рис. 21.10
Схемы реализации систем. По принципам структурной реализации систем различают следующие схемы:
1. Прямая форма. Реализуется непосредственно по разностному уравнению
yk =![]() bnxk-n -
bnxk-n -![]() amyk-m,
amyk-m,
или по передаточной функции
H(z) =![]() bnzn /(1+
bnzn /(1+![]() amzm).
amzm).
Пример прямой системы приведен на рис. 21.11.
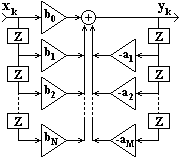
Рис. 21.11.
2. Прямая каноническая форма содержит минимальное число элементов задержки. Передаточную функцию РЦС можно представить в виде:
H(z) = Y(z)/X(z) = H1(z)H2(z),
H1(z) = V(z)/X(z) = 1/(1+![]() amzm), H2(z) = Y(z)/V(z) =
amzm), H2(z) = Y(z)/V(z) =![]() bnzn.
bnzn.
Отсюда:
v(k) = x(k) -![]() amv(k-m), (21.37)
amv(k-m), (21.37)
y(k) =![]() bnv(k-n). (21.38)
bnv(k-n). (21.38)
В разностных уравнениях (21.37-38) осуществляется только задержка сигналов v(k). Граф реализации РЦС приведен на рисунке 21.12.
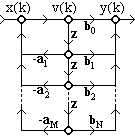
Рис. 21.12.
3. Каскадная (последовательная) форма. Соответствует представлению передаточной функции в виде произведения:
H(z) =![]() Hi(z).
Hi(z).
Hi(z) - составляющие функции типа (1-riz)/(1-piz) при представлении H(z) в факторизованной форме, где ri и pi - нули и полюсы функции H(z). В качестве функций Hi(z) обычно используются передаточные функции биквадратных блоков - фильтров второго порядка:
Hi(z) = (b0i+b1i⋅z+b2i⋅z2)/(1+a1i⋅z+a2i⋅z2).
4. Параллельная форма. Используется много реже и соответствует представлению передаточной функции в виде суммы биквадратных блоков или более простых функций.
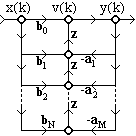
Рис. 21.13.
Обращенные формы. В теории линейных сигнальных графов существуют процедуры преобразования исходных графов с сохранением передаточных функций. Одна из таких процедур - обращение графов, которое выполняется путем изменения направления всех ветвей цепи, при этом вход и выход графа также меняются местами. Для ряда систем такая транспозиция позволяет реализовать более эффективные алгоритмы обработки данных. Пример обращения графа прямой канонической формы рекурсивной системы (с перестроением на расположение входа с левой стороны) приведен на рис. 21.13.
21.8. Нерекурсивнная фильтрация сигналов
Предмет фильтрации сигналов является основной областью применения нерекурсивных систем. Под фильтрацией будем понимать любое преобразование, при котором во входных сигналах целенаправленно изменяются определенные соотношения (динамические или частотные) между различными компонентами этих сигналов.
К операциям фильтрации информации традиционно относят операции сглаживания, прогнозирования, дифференцирования, интегрирования и разделения сигналов, а также выделение информационных (полезных) сигналов и подавление шумов (помех). Основным методом фильтрации данных являются частотная селекция сигналов. Системы, выполняющие операции фильтрации, обычно называют фильтрами.
Операция свертки сигнала с ядром (оператором) фильтра отображается в частотной области умножением спектра сигнала на частотный образ оператора фильтра. Тем самым, мы получаем возможность целенаправленно изменять спектр сигнала. Например, в звукозаписи изменение спектра сигнала позволяет очищать запись от шумов, компенсировать искажения сигнала различными устройствами звукозаписи, менять тембры инструментов. При обработке изображений фильтрация позволяет применять к изображению разные эффекты: размытие, подчеркивание границ, тиснение и пр. В самых различных областях фильтрация часто служит для разделения сигналов, смешанных в один, очищения сигнала от шумов, а также является составным компонентом многих других, более сложных процессов.
Частотные характеристики фильтров. В общем случае, фильтр меняет в спектре сигнала и амплитуды, и фазы гармоник. Однако фильтры можно проектировать так, чтобы они или не меняли фазу сигнала, или сдвигали все гармоники сигнала по времени на одну и ту же величину (сдвигали во времени весь сигнал). Такие фильтры называют фильтрами с линейной фазой.
Основное свойство фильтра – его амплитудно-частотная и фазочастотная характеристики (АЧХ и ФЧХ). Они показывают, какое влияние фильтр оказывает на амплитуду и фазу различных гармоник обрабатываемого сигнала. Если фильтр имеет линейную фазу, то рассматривается только АЧХ фильтра. Обычно частотная характеристика изображается в виде графика зависимости амплитуды от частоты (в децибелах). Так, если фильтр пропускает все сигналы в какой-либо полосе частот без изменения (коэффициент передачи равен 1), то это отображается значением 0 дБ. Подавление каких либо частот отображается со знаком минус (в 2 раза ⇒ -6 дБ, в 10 раз ⇒ -20 дБ, в 100 раз ⇒ -40 дБ), а усиление, соответственно, со знаком плюс. Пример частотной характеристики фильтра приведен на рис. 21.14.
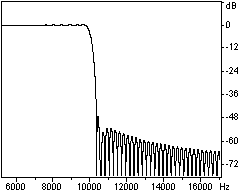
Рис. 21.14. Пример АЧХ фильтра.
В зависимости от общего вида частотной характеристики можно выделяют следующие распространенные типы фильтров: НЧ-фильтры (low-pass filters), ВЧ-фильтры (high-pass filters), полосовые фильтры, которые пропускают (band-pass filters) или подавляют (band-reject filters) сигнал только в определенной частотной полосе. Существуют и другие типы фильтров с более сложными частотными характеристиками.
Обычно в задачах фильтрации сигнала задается требуемая частотная характеристика фильтра. Построить в точности заданный фильтр обычно бывает не так просто. Тогда строится фильтр, близкий по характеристикам к заданному.
Например, невозможно построить идеальный фильтр низких частот, который пропускает без изменения все сигналы ниже определенной частоты (в полосе пропускания, pass band) и полностью подавляет все сигналы выше этой частоты (в полосе подавления, stop band). Такой фильтр реализуется оператором бесконечно большого размера. Реальные фильтры низких частот обладают плавным переходом от полосы пропускания (0 дБ с максимально возможными отклонениями обычно не более ±0.5 дБ) к полосе подавления, где сигнал подавляется, как правило, более чем в 100-1000 раз (рис. 21.14). Крутизна спада и значения подавления после спада определяются конкретными требованиями к фильтру.
В пределе, частотная характеристика фильтра может задаваться произвольной кривой. Например, фильтр может иметь несколько частотных полос пропускания с разными коэффициентами усиления, разделенных полосами с разными коэффициентами подавления.
Расчет операторов нерекурсивных фильтров. Существует много способов построения фильтров с заданной частотной характеристикой. Наиболее универсальный и, в то же время, наиболее простой – проектирование фильтров путем обратного преобразования Фурье требуемой частотной характеристики фильтра. Рассмотрим этот способ подробнее на примере чисто технической задачи формирования сигналов с высоким временным разрешением на выходе детекторов излучения.
Сигналы регистрации ионизирующих частиц формируются интегрированием заряда, в который трансформируется энергия частиц при ее поглощении в рабочей среде детектора. Идентификация энергии частиц по зарегистрированным сигналам обеспечивается при полном сборе заряда на выходе детектора, при этом постоянная времени RC интегрирования заряда на выходной RC-цепи детектора должна быть на порядок больше времени преобразования энергии в детекторе.
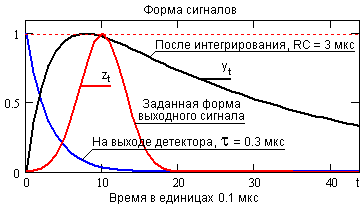
Рис. 21.15.
На рис. 21.15 приведен пример формы выходных сигналов детектора до и после сбора зарядов при постоянной τ = 0.3 мкс выхода заряда и RC = 3 мкс интегрирования заряда. Амплитуды сигналов нормированы по максимуму для наглядности сравнения.
Для исключения ошибок измерений при возможных наложениях последующих сигналов на спад предыдущих применяются различные способы укорочения сигналов y(t) и быстрого восстановления нулевой линии. Применение нерекурсивного формирующего фильтра позволяет решить эти задачи просто и эффективно.
Допустим, что необходимо превратить выходной сигнал y(t) в короткий и удобный для измерения амплитудных значений сигнал z(t), форма которого приведена на рис. 21.15. Это можно выполнить операцией свертки:
z(t) = h(t) * y(t),
для чего требуется определить соответствующий оператор преобразования h(t). Переведем левую и правую часть уравнения свертки в спектральную область:
Z(f) = H(f)·Y(f). (21.39)
Отсюда, частотная характеристика и функция требуемого оператора свертки определяются выражениями:
H(f) = Z(f) / Y(f). (21.40)
H(f) ↔ h(t). (21.41)
Возможность реализации оператора h(t) определяется устойчивостью решения уравнения (21.40) и зависит от частотных характеристик сигналов y(t) и z(t). К числу обязательных условий реализации следует отнести отсутствие полюсов функции Y(f) для исключения деления на ноль, и более быстрое затухание функции Z(f) по сравнению с функцией Y(f). В качестве сигнала z(t) целесообразно задавать функцию Гаусса такой ширины (на половине своей высоты), спектр которой Z(f) по своей основной значимой части соизмерим со спектром сигнала Y(f). Чем меньше ширина функции Гаусса, тем лучше будет выполняться сжатие сигнала, однако при чрезмерном сжатии и, соответственно, увеличении высокочастотных составляющих в Z(f), оператору h(t) придется осуществлять существенный подъем высокочастотных составляющих сигнала y(t), что приведет к увеличению коэффициента усиления фильтром дисперсии помех. С учетом каузальности работы формирующих фильтров выходные сигналы должен задаваться за пределами фронта сигнала y(t), а экстремумы сигналов – за пределами экстремума входного сигнала.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
