

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
σ2= ![]() (q(t)-
(q(t)-![]() )2 dt ≈
)2 dt ≈![]() (q(t)-
(q(t)-![]() )2 dt. (17.64)
)2 dt. (17.64)
Β(τ) = ![]() q(t)q(t+τ) dt ≈
q(t)q(t+τ) dt ≈![]() q(t)q(t+τ) dt. (17.65)
q(t)q(t+τ) dt. (17.65)
Спектральная плотность мощности случайного процесса (распределение мощности помех и шумов по частоте) связана с функцией автокорреляции преобразованием Фурье. В одностороннем (физическом) представлении спектра:
Β(f) = 4![]() B(τ) cos 2πfτ dτ. (17.66)
B(τ) cos 2πfτ dτ. (17.66)
Β(τ) =![]() B(f) cos 2πfτ dτ. (17.67)
B(f) cos 2πfτ dτ. (17.67)
Аддитивную помеху с равномерным спектром B(f) = B0 = const называют белым шумом. Мощность белого шума в полосе частот 0-F пропорциональна ширине полосы:
WF =![]() B(f) df = BoF.
B(f) df = BoF.
При белом шуме полоса частот всегда полагается конечной, т. к. в противном случае мы получим бесконечную мощность шумов.
Сигнал с аддитивной помехой обычно характеризуют не абсолютной мощностью помехи, а отношением средних мощностей сигнала и помехи, которое кратко называют отношением сигнал/помеха:
ρ = Wc/Wq.
Значения случайных процессов являются некоррелированными только при неограниченной полосе частот. Любое ограничение частотной полосы вносит определенную корреляцию в процесс и независимыми друг от друга можно считать только значения процесса, отстоящие друг от друга как минимум на интервал корреляции τo:
τo = (2/WF)![]() B(t) dt = 1/2F.
B(t) dt = 1/2F.
18. Динамическая и спектральная форма представления сигналов
18.1. Разложение сигналов по единичным импульсам
Динамическая форма представления сигналов соответствует естественному и привычному для нас математическому описанию в виде функций независимых переменных (аргументов) в реальном (текущем) масштабе времени. Динамические модели сигналов позволяют определять текущие значения сигналов в любых системах по заданным априори математическим функциям описания физических процессов в реальных физических системах или системных операций в программных системах. Достоинством динамических моделей является их универсальность, основные математические инструменты реализации - дифференциальные уравнения и интеграл Дюамеля, для цифровых сигналов - разностные уравнения и операция свертки.
Основной задачей динамической модели является математическое описание реакции системы (выходного сигнала системы) на определенное входное воздействие (входной сигнал). Моделирование и анализ линейных стационарных систем обработки сигналов произвольной формы в динамическом представлении базируется на разложении сигналов по единичным импульсам простейшей формы.
Единичные импульсы. В качестве математической модели единичного импульса при анализе аналоговых сигналов используют дельта-функцию.
Дельта-функция или функция Дирака. По определению, дельта-функция описывается следующими математическими выражениями (в совокупности):
δ(t-τ) = 0 при t ≠ τ, ![]() δ(t-τ) dt = 1.
δ(t-τ) dt = 1.
Функция δ(t-τ) не является дифференцируемой, и имеет размерность, обратную размерности ее аргумента, что непосредственно следует из безразмерности результата интегрирования. Значение дельта-функции равно нулю везде за исключением точки τ, где она представляет собой бесконечно узкий импульс с бесконечно большой амплитудой, при этом площадь импульса равна 1.
Дельта-функция является полезной математической абстракцией. На практике такие функции не могут быть реализованы с абсолютной точностью, так как невозможно реализовать значение, равное бесконечности, в точке t = τ на аналоговой временной шкале, т. е. определенной по времени также с бесконечной точностью. Но во всех случаях, когда площадь импульса равна 1, длительность импульса достаточно мала, а за время его действия на входе какой-либо системы сигнал на ее выходе практически не изменяется (реакция системы на импульс во много раз больше длительности самого импульса), входной сигнал можно считать единичной импульсной функцией со свойствами дельта - функции.
Функция Кронекера. Для дискретных и цифровых систем в качестве единичного импульса используется дискретный интегральный аналог дельта-функции - функция единичного отсчета δ(kΔt-nΔt), которая равна 1 в координатной точке k = n и нулю во всех остальных точках, при этом функция δ(kΔt-nΔt) определена только для целых значений координат k и n. Математические выражения δ(t-τ) и δ(kΔt-nΔt) называют также импульсами Дирака и Кронекера. Однако, применяя такую терминологию, не следует забывать, что это не просто единичные импульсы в координатных точках τ и nΔt, а импульсные функции, определяющие как значения импульсов в определенных координатных точках, так и нулевые значения по всем остальным координатам, в пределе от -∞ до ∞.
Разложение сигнала по единичным импульсам. Импульсы Дирака и Кронекера используются для разложения, соответственно, произвольных аналоговых сигналов s(t) и дискретных сигналов s(kΔt) в непрерывную последовательность неперекрывающихся (ортогональных) импульсов:
s(t) = s(τ)δ(t-τ) dτ. (18.1)
s(τ)δ(t-τ) dτ. (18.1)
s(kΔt) = s(nΔt)δ(kΔt-nΔt). (18.2)
s(nΔt)δ(kΔt-nΔt). (18.2)
Для аналоговых сигналов разложение (18.1) в физическом представлении эквивалентно сканированию значений сигнала s(t) в моменты времени t = τ бесконечно узкой щелью, бегущей вдоль оси t. Для цифровых сигналов эта щель равна одному отсчету. Пример разложения дискретного сигнала приведен на рис. 18.1.
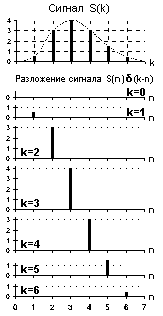
Рис. 18.1.
Единичные импульсные функции δ(t-τ), -∞<τ, и δ(kΔt-nΔt), -∞<n<∞, образуют в бесконечномерных пространствах системы координатных базисов {δ(t-τ)} и {δ(kΔt-nΔt)}, т. к. они не перекрываются и, соответственно, взаимно ортогональны. По этим координатным системам и производится разложение сигналов s(t) и s(kΔt). Совокупности проекций сигналов на координатные базисы представляют собой векторные описания сигналов.
Импульсный отклик линейной системы. Если на вход линейной системы в момент времени t = 0 подать единичный импульс (Дирака или Кронекера, в зависимости от типа системы), то на выходе мы получим реакцию системы на единичный входной сигнал. Эта реакция называется функцией импульсного отклика системы или импульсной характеристикой. Она однозначно определяется оператором преобразования h(..):
y(t) = T[δ(t-0)] = h(t). (18.3)
y(kΔt) = T[δ(kΔt-0)] = h(kΔt). (18.4)
Импульсный отклик аналоговой системы на входную дельта-функцию также в определенной степени представляет собой математическую абстракцию идеального преобразования. С практической точки зрения под импульсным откликом можно понимать отображение реакции системы на импульсный входной сигнал произвольной формы с единичной площадью, если длительность этого сигнала пренебрежимо мала по сравнению с временной (координатной) разрешающей способностью системы. Для цифровых систем импульсный отклик однозначно определяется реакцией системы на импульс Кронекера. Функцию импульсного отклика называют также весовой функцией системы.
Очевидно, что в линейных и инвариантных к сдвигу системах форма импульсного отклика не зависит от времени прихода входного сигнала и определяет только его положение на временной оси. Так, если входной импульс задержан (относительно 0) на время to, то соответствующий выходной сигнал будет определяться выражением:
y(t) = T[δ(t-to)] = h(t-to).
В любой системе, работающей в реальном масштабе времени, сигнала на выходе системы не может быть, если нет сигнала на ее входе. Отсюда следует односторонность импульсного отклика физических систем:
h(t-τ) = 0 при t<τ.
Для программных систем, работающих с зарегистрированными массивами цифровых данных, импульсный отклик может быть и двусторонним, так как при обработке сигналов в любой текущей точке kΔt системе доступны как "прошлые" отсчеты kΔt-nΔt, так и "будущие" отсчеты kΔt+nΔt. Это резко расширяет возможности программной обработки сигналов по сравнению с физическими системами.
На рисунке 18.2 приведен пример импульсного отклика h(t) элементарной физической системы преобразования электрических сигналов – динамической интегрирующей RC-цепи.
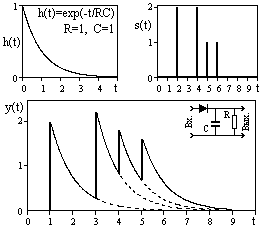
Рис. 18.2.
Подобные схемы очень часто применяются в полевых геофизических приборах (например, в радиометрах) в качестве интенсиметров - измерителей средней скорости счета импульсных потоков сигналов.
При подаче на вход RC-цепи единичного и очень короткого
(Δt << RC) импульса заряда Δq емкость С заряжается до напряжения Vо = Δq/C, и начинает разряжаться через сопротивление R, при этом напряжение на емкости изменяется по закону

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
