

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
v(t) = Voexp(-t/RC) = (Δq/C)exp(-t/RC).
Отсюда, импульсный отклик RC-цепи на единичный входной сигнал с единичным значением заряда Δq = 1 равен:
h(t) = (1/C)exp(-t/RC),
где форма отклика определяется функцией экспоненты, а множитель (1/С) является масштабным преобразователем сигнала (заряда в напряжение). По существу, импульсным откликом системы определяется доля входного сигнала, которая действует на выходе системы по истечении времени t после поступления сигнала на вход (запаздывающая реакция системы).
Если функция импульсного отклика системы известна, то, с учетом принципа суперпозиции сигналов в линейной системе, можно выполнить расчет реакции системы в любой произвольный момент времени на любое количество входных сигналов в любые моменты времени их прихода путем суммирования запаздывающих реакций системы на эти входные сигналы. На рис. 18.2 приведен пример входного сигнала s(t) для RC-цепи в виде последовательности импульсов и реакция системы y(t) на такой входной сигнал, образованная суммированием реакций системы на каждый импульс.
Допустим, что на вход RC-цепи в моменты времени t1=1 и t2=2 поступили очень короткие (по сравнению со значением RC) импульсы заряда величиной A и В. Математически это можно отобразить сигналом s(t) = q1(t)+q2(t), где q1(t) = A⋅δ(t-t1) и q2 = B⋅δ(t-t2). Выходной сигнал системы при известном импульсном отклике h(t) отобразится формулой:
y(t) = T[q1(t)+q2(t)] = T[Aδ(t-t1)]+T[Bδ(t-t2)] = A⋅T[δ(t-t1)]+B⋅T[δ(t-t2)] = =A⋅h(t-t1)+B⋅h(t-t2).
При расчете значений выходного сигнала в произвольный момент времени t после прихода на вход системы сигналов q1 и q2, например, для t = 5, для каждого из сигналов вычисляются значения их запаздывающих реакций: y1 = A⋅h(5-1) = A⋅h(4) и y2 = B⋅h(5-2) = B⋅h(3), после чего значения запаздывающих реакций суммируются у = у1+у2. Пример этой операции можно видеть на рис. 18.3, где для удобства графического представления приняты значения А=1 и В=1.
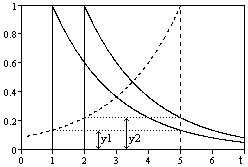
Рис. 18.3.
Сущность операции не изменяется при любых значениях А и В, а в общем случае и для любого количества импульсов.
Однако эту же операцию можно рассматривать и с другой позиции. Развернем импульсный отклик h(t) системы на 1800 и поместим его начало h(0) непосредственно в точку, для которой нужно выполнить расчет выходного сигнала, т. е. в точку t=5 для нашего примера. Если теперь отсчет координат для функции h(t) повести назад от точки расчета по аргументу τ, т. е. перейти на вычисление h(τ), где значение τ изменяется от 0 и далее (в пределе до ∞), то нетрудно убедиться (на рисунке это наглядно видно), что функция h(τ) пересечет входные импульсы на тех же значениях у1 и у2. Для этих точек пересечения первого и второго импульсов соответственно имеет место τ1 = t-t1 и τ2 = t-t2, как и при прямом методе расчета запаздывающих реакций при расчете значений h(t-t1) и h(t-t2). После умножения полученных значений h(τ1) и h(τ2) на значения входного сигнала А и В, получаем полную аналогию:
y1 = A⋅h(τ1) = A⋅h(t-t1) и y2 = B⋅h(τ2) = B⋅h(t-t2),
и соответственно суммарный сигнал у = у1+у2.
Такое, чисто математическое представление расчета более удобно для составления математических алгоритмов вычислений. Условно этот процесс для коротких входных импульсных сигналов может быть представлен в следующем виде. Для любой точки расчета ti выходного сигнала инвертированная по координатному направлению функция импульсного отклика h(τ) помещается в эту точку ti и просматривается по своей координате τ с одновременным синхронным просмотром входного сигнала s(t) назад от точки расчета (прошлые значения входного сигнала) по координатам ti-τ. Значения всех встреченных при просмотре импульсов s(ti-τ) перемножаются со значениями h(τ) и суммируются. Тем самым, для каждой текущей точки расчета ti в аналоговой системе выполняется операция:
y(ti) = h(τ)⋅s(ti-τ) dτ. (18.5)
h(τ)⋅s(ti-τ) dτ. (18.5)
Соответственно в цифровых системах для произвольной точки k:
y(kΔt) = h(nΔt)⋅s(kΔt-nΔt). (18.6)
h(nΔt)⋅s(kΔt-nΔt). (18.6)
Полученная сумма значений и будет представлять собой запаздывающую реакцию системы на все импульсы, поступившие на вход системы до текущей точки расчета выходного сигнала.
Таким образом, для линейных и стационарных систем легко определить их реакцию на любой входной сигнал, если известен импульсный отклик систем на единичный входной сигнал.
18.2. Свертка (конволюция) сигналов
Интеграл Дюамеля позволяет определять реакцию системы на воздействие s(t) в текущем времени по ее переходной функции g(t) на единичный скачок входного воздействия:
y(t)= y(0)+ g(τ)s(t-τ) dτ, (18.7)
g(τ)s(t-τ) dτ, (18.7)
где y(0) – начальное значение выходного сигнала системы.
Пример расчета выходного сигнала системы на ступенчатый входной сигнал приведен на рис. 18.4.
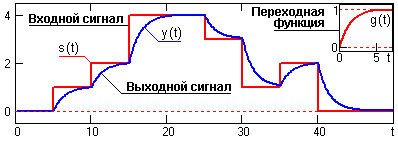
Рис. 18.4.
Ступенчатая форма сигнала принята для более наглядного представления процесса формирования выходного сигнала. В общем случае, форма входного воздействия может быть произвольной.
Интеграл свертки – это вариант интеграла Дюамеля. Произвольный сигнал на входе системы с использованием выражений разложения сигнала может быть представлен в виде последовательной линейной комбинации взвешенных единичных импульсов:
y(t) = T[s(t)] = T[![]() s(τ) δ(t-τ) dτ].
s(τ) δ(t-τ) dτ].
На основании принципа суперпозиции линейный оператор Т может быть внесен под знак интеграла, т. к. последний представляет собой предельное значение суммы. При этом операция преобразования действует только по переменной t. Отсюда следует:
y(t) =  s(τ) Т[δ(t-τ)] dτ =
s(τ) Т[δ(t-τ)] dτ =  s(τ) h(t-τ) dτ. (18.8)
s(τ) h(t-τ) dτ. (18.8)
Это выражение и представляет собой интеграл свертки (конволюции) входного сигнала с импульсной характеристикой системы. Заменой переменных t-τ = τ можно убедиться в том, что свертка коммутативна:
 s(τ) h(t-τ) dτ ≡
s(τ) h(t-τ) dτ ≡ h(τ) s(t-τ) dτ. (18.9)
h(τ) s(t-τ) dτ. (18.9)
Функция h(τ) называется ядром свертки (kernel) или импульсной характеристикой линейной системы.
Смысл интеграла свертки состоит в том, что входной сигнал представляется сомкнутой последовательностью следующих друг за другом коротких импульсов, площади которых равны значению сигнала в моменты их следования при длительности импульсов, стремящейся к нулевой. Такая последовательность импульсов условно может рассматриваться в виде последовательности дельта-функций с площадями, равными площадям соответствующих импульсов. Реакция системы (18.8) находится как сумма реакций на каждый импульс, составляющий входное воздействие.
Аналогично, для дискретных сигналов, где значение Δt, как правило, принимается равным 1, а индексы k и n выполняют роль номеров отсчетов числовых рядов:
y(k) = h(n) s(k-n). (18.10)
h(n) s(k-n). (18.10)
В цифровых методах обработки сигналов функцию h(n) обычно называют оператором свертки, а его размер по числу отсчетов – окном оператора свертки.
Выражения (18.8) имеют специальную форму упрощенной математической записи в символическом виде:
y(t) = s(t-τ) * h(τ) ≡ s(t) * h(t).
Сравнением выражений (18.9 и 18.10) с выражениями (18.5) нетрудно убедиться в их полной идентичности, за исключением нижнего предела интегрирования (суммирования). Это и понятно, так как выражения (18.5) были получены при рассмотрении реальной физической системы, работающей в реальном масштабе времени, импульсный отклик которых является односторонним (равен нулю при τ<0). Для таких систем интегрирование (и суммирование) от -∞ до 0 не имеет смысла. Кроме того, в реальных физических системах импульсный отклик, как правило, отличен от нуля только на определенном интервале, и, соответственно, пределы интегрирования (суммирования) в выражениях (18.9 и 18.10) ограничиваются значениями, на которых функции h(τ) и h(n) существует или имеет значимые значения.
Сигналы, обрабатываемые на компьютере, имеют конечную продолжительность. Допустим, сигнал s(k) отличен от нуля только на отрезке от 0 до K включительно ("имеет длину K+1"). Пусть окно оператора свертки h(n) отлично от нуля на отрезке от – N до N (2N+1 отсчет). При подстановке этих сигналов в уравнение свертки, мы получим сигнал y(k), который отличен от нуля на отрезке от − N до K+N включительно. Таким образом, длина выходного сигнала равна 2N+K+1, т. е. сумме длин исходного сигнала и ядра свертки минус один.
Техника свертки. Для вычисления свертки по выражению (18.9) функция импульсного отклика реверсируется по своей координате, т. е. строится в режиме обратного времени, и движется относительно функции входного сигнала в сторону возрастания значений t. В каждый текущий момент времени значения обеих функций перемножаются, а произведение интегрируется в пределах окна импульсного отклика. Полученный результат относится к той координатной точке, против которой находится значение импульсного отклика h(0).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
