

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
= ![]()
![]() M{X(t1)X(t2)}dt1dt2 =
M{X(t1)X(t2)}dt1dt2 = ![]()
![]() Rx(t1,t2)dt1dt2, (20.78)
Rx(t1,t2)dt1dt2, (20.78)
т. е. корреляционная функция интеграла от случайной функции равна двойному интегралу от корреляционной функции исходной случайной функции.
Преобразования стационарных случайных функций выполняются по вышеприведенным формулам и дают следующие результаты (вместо корреляционных функций приводятся ковариационные функции, которые обычно используются на практике).
Математическое ожидание выходного сигнала Z(t) входной стационарной случайной функции X(t) по (20.54):
mz = h(τ) * mx = mx![]() h(τ) dτ, (20.79)
h(τ) dτ, (20.79)
Отсюда следует, что математическое ожидание выходных сигналов системы равно математическому ожиданию входных сигналов, умноженному на площадь (или сумму коэффициентов) импульсного отклика системы, т. е. на коэффициент усиления системой постоянной составляющей. Если система не пропускает постоянную составляющую сигналов (площадь или сумма коэффициентов импульсного отклика системы равна нулю), то случайный выходной сигнал всегда будет иметь нулевое математическое ожидание.
Сумма двух стационарных случайных функций X(t) и Y(t) дает стационарную случайную функцию Z(t), при этом:
mz = mx + my, Dz = Dx + Dy + 2Kxy(0). (20.80)
Kz(t1,t2) = Kz(τ) = Kx(τ) + Ky(τ) + Kxy(τ) + Kyx(τ). (20.81)
Сумма стационарной случайной и неслучайной функций X(t) и y(t) нестационарна по математическому ожиданию:
mz(t) = mx + y(t), Kz(τ) = Kx(τ). (20.82)
Произведение стационарной случайной и неслучайной функций X(t) и y(t) - нестационарная случайная функция, так как:
mz(t) = y(t)⋅mx, Dz(t) = y2(t)⋅Dx. (20.83)
Kz(t,τ) = y(t)y(t+τ)Kx(τ). (20.84)
Производная от стационарной случайной функции - стационарная случайная функция с математическим ожиданием mz = 0 и ковариационными функциями:
Kz(t1,t2) = ![]() Kx(t1-t2) = -
Kx(t1-t2) = -![]() Kx(τ) = Kz(τ). (20.85)
Kx(τ) = Kz(τ). (20.85)
Kzx(τ) = d(Kx(τ))/dτ, Kxz(τ) = - d(Kx(τ))/dτ. (20.86)
Из выражения (9.3.85) следует также, что для дифференцируемости X(t) необходимо, чтобы ее ковариационная функция была дважды дифференцируемой по τ.
Интеграл от стационарной случайной функции - нестационарная случайная функция с математическим ожиданием mz(t) =![]() mx(t)dt и функцией ковариации:
mx(t)dt и функцией ковариации:
Kz(t1,t2) =![]()
![]() Kx(u1-u2) du1du2. (20.87)
Kx(u1-u2) du1du2. (20.87)
20.5. Модели случайных сигналов и помех
Наиболее распространенными моделями случайных сигналов и помех являются телеграфный сигнал, белый шум, гауссовый случайный процесс, гауссовый шум.
Телеграфный сигнал - это случайный процесс xk(t), представляющий собой последовательность прямоугольных положительных и отрицательных импульсов со случайными длительностями и детерминированными значениями амплитуд c и - с, причем перемены знака внутри любого интервала (t, t+τ) происходят с интенсивностью α в случайные моменты времени, и не зависят от процессов в смежных интервалах времени (рис. 20.8).

Рис. 20.8. Телеграфный сигнал.
Если считать случайной величиной телеграфного сигнала значение n - количество перемен знака внутри интервала τ, то распределение вероятностей значений n будет описываться законом Пуассона:
P(n) = (α|τ|)2 exp(-α|τ|)/n! (20.88)
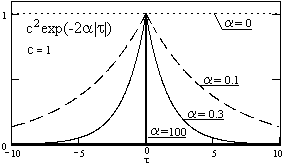
Рис. 20.9. Функция корреляции сигнала.
При вычислении корреляционной функции (рис. 20.9) телеграфного сигнала каждое отдельное произведение xk(t)xk(t+τ) равно либо с2, либо - с2 в зависимости от совпадения или несовпадения знаков xk(t) и xk(t+τ), причем вероятность с2 равна сумме вероятностей Р(0)+Р(2)+Р(4)+..., а вероятность - с2 определяется соответственно суммой вероятностей Р(1)+Р(3)+Р(5)+... .
Следовательно:
Rx(τ)=c2![]() (-1)nP(n)=c2exp(-α|τ|)
(-1)nP(n)=c2exp(-α|τ|)![]() (-1)n(α|τ)n/n!=c2exp(-2α|τ|).(20.89)
(-1)n(α|τ)n/n!=c2exp(-2α|τ|).(20.89)
Параметр α полностью определяет ковариационные и спектральные свойства телеграфного сигнала. При α ⇒0 характеристики сигнала приближаются к характеристикам постоянной составляющей, при α ⇒ ∞ - к характеристикам белого шума.
Интервал ковариации сигнала:
Τκ = 2![]() (Rx(τ)/c2) dτ = 2/α. (20.90)
(Rx(τ)/c2) dτ = 2/α. (20.90)
Отсюда следует, что чем больше α, тем меньше время ковариации процесса. При α ⇒ 0 Tk ⇒ ∞ и процесс вырождается в детерминированный (стремится к постоянной составляющей).
При α⇒∞ Tk⇒0 и процесс вырождается в белый шум с некоррелированными отсчетами даже на соседних временных точках.
Двусторонняя спектральная плотность сигнала:
Sx(ω)=![]() Rx(τ) exp(-jωτ) dτ= αc2/(α2+ω2). (20.91)
Rx(τ) exp(-jωτ) dτ= αc2/(α2+ω2). (20.91)
Односторонняя спектральная плотность:
Gx(ω)= 2αc2/(α2+ω2). (20.92)
Ширина спектра телеграфного сигнала:
Βκ =![]() Gx(ω) dω/Gx(0) ≡
Gx(ω) dω/Gx(0) ≡![]() Sx(ω) dω/Sx(0) = απ. (20.93)
Sx(ω) dω/Sx(0) = απ. (20.93)
Отсюда следует, что спектр случайного процесса тем шире, чем меньше интервал ковариации процесса (рис. 20.10).
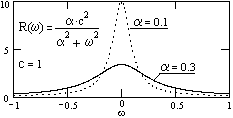
Рис. 20.10. Спектр сигнала.
Белый шум является стационарным случайным процессом q(t), у которого автокорреляционная функция описывается дельта - функцией Дирака и, соответственно, спектральная плотность мощности не зависит от частоты и имеет постоянное значение Wq(f) = σ2, равное дисперсии значений q(t). Другими словами, все спектральные составляющие белого шума имеют одинаковую мощность (как белый цвет содержит все цвета видимого спектра). По существу, это идеализированный случайный процесс с бесконечной энергией. Но в случае постоянства спектральной плотности мощности случайного процесса в конечном диапазоне частот введение такой идеализации позволяет разрабатывать достаточно легко реализуемые оптимальные методы фильтрации. Многие помехи в радиотехнике, в технике связи и в других отраслях, в том числе в информатике, рассматривают как белый шум, если эффективная ширина спектра сигналов Bs много меньше эффективной ширины спектра шумов Bq
Bs/Bq << 1,
и спектральная плотность мощности шумов слабо изменяется в интервале спектра сигнала. Понятие "белый шум" определяет только спектральную характеристику случайного процесса, а, следовательно, под это понятие подпадают любые случайные процессы, имеющие равномерный энергетический спектр и различные законы распределения. Если частотный диапазон спектра, на котором рассматриваются сигналы и помехи, равен 0-В, то спектральная плотность шума задается в виде:
Wq(f)=σ2, 0≤ f ≤B; Wq(f)=0, f > B, (20.94)
при этом корреляционная функция шума определяется выражением:
Rq(τ)= σ2 B⋅sin(2πBτ)/2πBτ. (20.95)
Эффективный интервал корреляции:
Tk = 2![]() |Rq(τ)|dτ /Rq(0). (20.96)
|Rq(τ)|dτ /Rq(0). (20.96)
Реальный интервал корреляции целесообразно определять по ширине главного максимума функции Rq(τ) (значения τ при первых пересечениях нулевой линии), в котором сосредоточена основная часть энергии шумов, при этом Tk = 1/В и BTk = 1 > 1/2, т. е. соотношение неопределенности выполняется.
Как следует из всех этих выражений и наглядно видно на рис. 20.11, при ограничении частотного диапазона в шумах появляется определенная корреляция между значениями, и, чем меньше частотный диапазон шумов, тем больше их радиус корреляции.
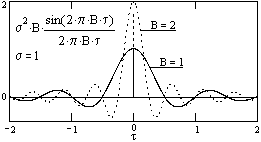
Рис. 20.11. Функции корреляции белого шума в частотном интервале 0-В.
По существу, ограничение шумов определенным частотным диапазоном эквивалентно фильтрации белого шума частотным фильтром с соответствующей шириной полосы пропускания, при этом, корреляционная функция импульсного отклика фильтра свертывается с дельта – функцией белого шума.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
