

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Разделимые последовательности. Разделимой называют последовательность, которую можно представить в виде произведения одномерных последовательностей. Так, для двумерной разделимой последовательности:
s(n, m) = s(n) s(m).
Разделение возможно для немногих практических сигналов. Однако любое двумерное множество с конечным числом ненулевых отсчетов разлагается на конечную сумму разделимых последовательностей:
s(n, m) =![]() si⋅n(n) si⋅m(m),
si⋅n(n) si⋅m(m),
где N - число ненулевых строк или столбцов массива. Для этого достаточно выразить s(n, m) в виде суммы отдельных строк:
s(n, m) = ![]() s(n, i) δ(m-i). (22.3)
s(n, i) δ(m-i). (22.3)
Конечные последовательности. Важным классом сигналов являются последовательности конечной протяженности, для которых сигнал равен нулю вне определенной области, называемой опорной областью сигнала. На рис.22.5 условно представлена двумерная последовательность конечной протяженности, значения которой отличны от нулевых только внутри ограниченной прямоугольной области -3![]() n
n![]() 2, -2
2, -2![]() m
m![]() .
.
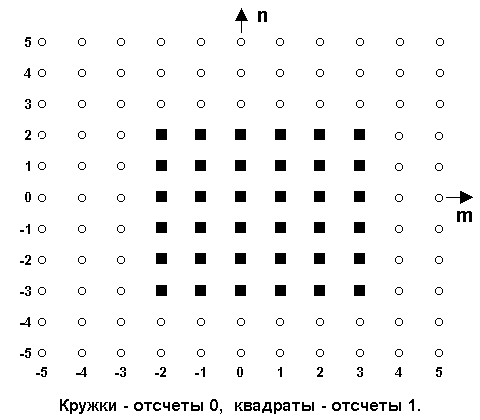
Рис. 22.5.
Опорная область сигнала может быть произвольной формы и выходить за пределы сигнала, частично включая нулевые отсчеты. Отсчеты за пределами опорной области считаются равными нулю.
Периодические последовательности. Двумерные последовательности могут быть периодическими, регулярно повторяющимися в пространстве. Последовательность, удовлетворяющая условиям:
s(n, m+M) = s(n, m),
s(n+N, m) = s(n, m), (22.4)
обладает периодичностью в двух направлениях, по n и по m. Значения М и N называют интервалами периодичности сигнала соответственно по координатам m и n (горизонтальными и вертикальными интервалами периодичности). Прямоугольная форма области периода (пример на рис.22.6) наиболее удобна при обработке данных, но не является единственно возможной.
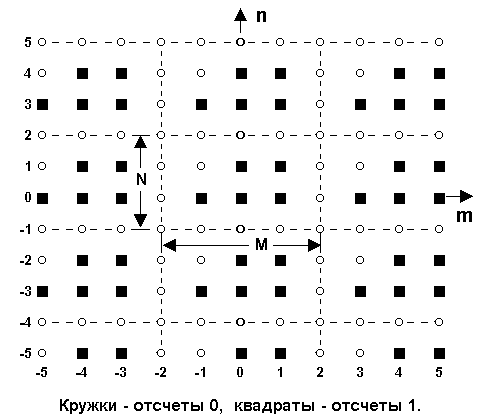
Рис. 22.6.
Для двумерных последовательностей условия (22.4) могут рассматриваться как частный случай общих условий периодичности:
s(n+N1, m+M1) = s(n, m), (22.5)
s(n+N2, m+M2) = s(n, m),
D = N1M2 - N2M1 ![]() 0.
0.
Упорядоченные пары (N1,M1) и (N2,M2) представляют собой смещения от отсчетов одного периода к соответствующим отсчетам других периодов и могут рассматриваться как векторы N и M, которые образуют области периодов в форме параллелограмма. Линейная независимость векторов обеспечивается при ненулевом определителе D, а количество отсчетов в пределах периода равно |D|. Пример периодической последовательности с векторами (4,4) и (3,-5) приведен на рис. 22.7.
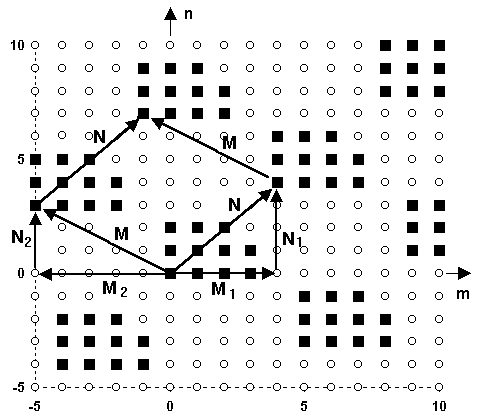
Рис. 22.7.
Понятие периодичности можно обобщить на многомерные сигналы. P-мерный сигнал s(![]() ) будет представлять собой P-мерную периодическую последовательность, если существует P линейно независимых P-мерных целочисленных N-векторов периодичности, с которыми выполняется условие:
) будет представлять собой P-мерную периодическую последовательность, если существует P линейно независимых P-мерных целочисленных N-векторов периодичности, с которыми выполняется условие:
s(![]() ) = s(
) = s(![]() +
+![]() ), i = 1,2,3, ... ,P.
), i = 1,2,3, ... ,P. ![]()
Столбцы векторов Ni образуют матрицу периодичности N размером P Ч P. Векторы периодичности матрицы линейно независимы при наличии у матрицы ненулевого определителя. Абсолютное значение определителя равно числу отсчетов в периоде. Последовательность s(![]() ) прямоугольно периодична для случаев диагональной матрицы N. Если функция s(
) прямоугольно периодична для случаев диагональной матрицы N. Если функция s(![]() ) периодична с матрицей периодичности N, то для любого целочисленного вектора Р имеет место s(
) периодична с матрицей периодичности N, то для любого целочисленного вектора Р имеет место s(![]() +
+![]()
![]() ) = s(
) = s(![]() ), и матрица PN также будет матрицей периодичности для s(
), и матрица PN также будет матрицей периодичности для s(![]() ). Отсюда следует, что любая многомерная периодическая последовательность имеет не единственную матрицу периодичности.
). Отсюда следует, что любая многомерная периодическая последовательность имеет не единственную матрицу периодичности.
22.2. Двумерные системы
Системы осуществляют преобразование сигналов. Формализованная система - это оператор (операция) отображения входного сигнала на выходной: z(x, y) = Т[s(x, y)].
Базовыми операциями в системах, комбинациями которых осуществляются преобразования, являются операции скалярного умножения, сдвига и сложения:
z(n, m) = c s(n, m),
z(n, m) = s(n-N, m-M),
z(n, m) = s(n, m)+u(n, m).
Используя базовые операции, любую двумерную последовательность можно разложить на сумму взвешенных двумерных единичных импульсов:
s(n, m) =![]()
![]() s(i, j) δ(n-i, m-j). (22.6)
s(i, j) δ(n-i, m-j). (22.6)
Обобщением скалярного умножения является пространственное маскирование:
z(n, m) = cn, m s(n, m). (22.7)
Правая часть равенства (22.7) представляет собой поэлементное произведение входного сигнала на совокупность чисел сn, m.
Кроме линейных операций в системах используются также безынерционные нелинейные преобразования с независимым нелинейным воздействием на значения отсчетов входной последовательности. Пример операции - возведение в квадрат:
zn, m = (sn, m)2.
Линейные системы. Система считается линейной при выполнении двух условий:
1. Пропорциональное изменение входного сигнала вызывает пропорциональное изменение выходного сигнала.
2. Суммарный сигнал двух входных последовательностей дает суммарный сигнал двух соответствующих выходных последовательностей.
Другими словами, если оператор Т[s(x, y)] описывает линейную систему и имеет место
z(x, y) = Т[s(x, y)], q(x, y) = Т[u(x, y)],
то
Т[as(x, y)+bu(x, y)] = az(x, y)+bq(x, y).
Линейные системы подчиняются принципу суперпозиции сигналов.
В выражении (22.6) значения s(i, j) можно рассматривать как скалярные множители для соответствующих единичных импульсов. Применяя оператор преобразования Т[.] к левой и правой части (22.6), получаем:
Т[s(n, m)] = у(n, m) = ![]()
![]() s(i, j) T[δ(n-i, m-j)],
s(i, j) T[δ(n-i, m-j)],
z(n, m) = ![]()
![]() s(i, j) hij(n, m), (22.8)
s(i, j) hij(n, m), (22.8)
где hij(n, m) - отклик системы в точке (n, m) на единичный импульс в точке (i, j). Если импульсный отклик hij(n, m) определен для всех точек (i, j), то отклик системы на произвольный многомерный сигнал, как и для одномерных систем, находится с помощью суперпозиции.
Инвариантность к сдвигу. Система инвариантна к сдвигу, если сдвиг входной последовательности приводит к такому же сдвигу выходной последовательности:
Т[s(n-N, m-M)] = z(n-N, m-M).
Линейность и инвариантность к сдвигу являются независимыми свойствами системы. Так, пространственное маскирование линейно, но не инвариантно к сдвигу, а безынерционные операторы нелинейны, но инвариантны к сдвигу.
В дальнейшем ограничимся рассмотрением только систем, широко распространенных при решении практических задач - линейных и инвариантных к сдвигу (ЛИС-системы).
Импульсный отклик на произвольно расположенный входной импульс, как следует из выражения (22.8), описывается выражением:
hij(n, m) = T[δ(n-ni, m-mj)].
Для частного случая i = j = 0 имеем:
ho(n, m) = T[δ(n, m)].
Используя принцип инвариантности к сдвигу, получим:
hij(n, m) = ho(n-i, m-j) = h(n-i, m-j), (22.9)
т. e. импульсный отклик на произвольно расположенный входной импульс равен сдвинутому импульсному отклику на входной импульс, расположенный в начале координат.
Двумерная свертка. Подставляя (22.9) в выражение (22.8), получаем:
z(n, m) = Σi Σj s(i, j) h(n-i, m-j). (22.10)
Двумерная дискретная свертка (22.10), является аналогом одномерной дискретной свертки. При замене переменных n-i = k, m-j=l, получим:
z(n, m) = Σk Σl h(k, l) s(n-k, m-l), (22.11)
т. е. двумерная свертка коммутативна, как и одномерная. В такой же мере она обладает свойством ассоциативности по отношению к последовательности операций свертки нескольких функций (результат не зависит от порядка свертки) и свойством дистрибутивности по отношению к операции свертки с суммой функций (результат аналогичен сумме сверток с каждой функцией). Эти свойства определяют и основное свойство двумерных (и многомерных) линейных систем при их параллельном и/или последовательном соединении – результирующая система также является линейной.
Для упрощения символьного аппарата двумерную свертку обозначают индексом (**):

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
