

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
y(t)⋅y(t+τ) = ![]()
![]() h(α)h(β) x(t-α)x(t+τ-β) dα dβ.
h(α)h(β) x(t-α)x(t+τ-β) dα dβ.
Если взять математические ожидания от обеих частей этого равенства, то, с учетом соотношения в подынтегральном выражении
M{x(t-α) x(t+τ-β)} = - Rx(t-α-t-τ+β) = Rx(τ+α-β),
получим:
Ry(τ) = ![]()
![]() h(α)h(β) Rx(τ+α-β) dα dβ ≡ Rx(τ) * h(τ+α) * h(τ-β). (21.26)
h(α)h(β) Rx(τ+α-β) dα dβ ≡ Rx(τ) * h(τ+α) * h(τ-β). (21.26)
Таким образом, функция автокорреляции (АКФ) выходного сигнала равна АКФ входного сигнала, свернутой дважды, в прямом и обратном направлении, с импульсным откликом системы, что сохраняет четность АКФ выходного сигнала. Для нецентрированных процессов аналогичное заключение действительно и для ковариационных функций.
Заметим, что для свертки импульсных откликов, производя замену τ-β = t, мы имеем равенство:
h(τ+α) * h(τ-β) = h(t+α+β) * h(t) = h(t) * h(t+γ) = Kh(t),
где Kh(t) - функция ковариации импульсного отклика системы. Отсюда:
Ry(τ) = Rx(τ) * Kh(τ). (21.27)
Это означает появление в случайном сигнале на выходе системы определенной корреляционной зависимости, вызванной инерционностью системы, причем радиус корреляции выходного сигнала обратно пропорционален верхней частоте, пропускаемой системой.
Для взаимной корреляционной функции (ВКФ) Rxy входного и выходного сигналов соответственно имеем:
x(t)⋅y(t+τ) = ![]() h(α) x(t)y(t+τ-α) dα.
h(α) x(t)y(t+τ-α) dα.
Rxy(τ) = ![]() h(α) Rx(τ-α) dα ≡ Rx(τ) * h(τ-α). (21.28)
h(α) Rx(τ-α) dα ≡ Rx(τ) * h(τ-α). (21.28)
т. е. функция взаимной корреляции входного и выходного сигналов равна свертке АКФ входного сигнала с функцией импульсного отклика системы - фильтрации АКФ сигнала этим же фильтром. Заключение действительно и для функций ковариации.
Другая взаимно корреляционная функция Ryx может быть получена из соотношения:
Ryx(τ) = Rxy(-τ) ≡ Rx(τ) * h(τ+α). (21.29)
Отметим, что для статистически независимых случайных величин при одностороннем импульсном отклике h(τ)=0 при τ<0 функция Rxy(τ) также является односторонней и равна 0 при τ<0, а функция Ryx соответственно равна 0 при τ>0.
Спектральные соотношения, которые характеризуют систему в целом по отношению к преобразованию случайных сигналов, это соотношения частотных плотностей распределения мощности случайных процессов на входе и выходе, которые для краткости обычно называют спектральными плотностями процессов (сигналов) или спектрами мощности.
Применяя преобразование Фурье к выражениям (21.26), для спектра мощности выходного сигнала получаем:
Wy(f) = Wx(f) |H(f)|2. (21.30)
Спектр мощности сигнала на выходе системы равен спектру мощности входного сигнала, умноженному на квадрат модуля частотной характеристики фильтра. С учетом четности корреляционных функций спектр мощности выходного сигнала также является четной действительной функцией и не имеет фазовой характеристики процесса.
Аналогично, для взаимного спектра мощности на основе выражений (21.28-29):
Wxy(f) = Wx(f) H(f). (21.31)
Wyx(f) = Wx(f) H(-f).
Взаимный спектр мощности при одностороннем импульсном отклике является комплексным и содержит как амплитудную, так и фазовую характеристику процесса.
Отметим, что с использованием выражения (21.31) можно производить определение частотной характеристики и импульсного отклика системы:
H(f) = Wxy/Wx ⇔ h(t).
Дисперсия выходного сигнала может быть определена с использованием формул (21.26-30):
σy2 = Ry(0) = ![]() Wx(f) |H(f)|2 df ≡ Rx(0)
Wx(f) |H(f)|2 df ≡ Rx(0) ![]() h2(t) dt = σx2
h2(t) dt = σx2 ![]() h2(t) dt, (21.32)
h2(t) dt, (21.32)
что полностью соответствует полученной ранее формуле (21.30) для цифровой системы.
Если сигнал нецентрированный и значение дисперсии входного сигнала неизвестно, то по аналогичным формулам вычисляется сначала средний квадрат выходного сигнала или так называемая средняя мощность сигнала:
![]() =
=![]() = Ry(0) ≡
= Ry(0) ≡ ![]()
![]() h2(t) dt ≡
h2(t) dt ≡ ![]() Wx(f) |H(f)|2 df, (21.33)
Wx(f) |H(f)|2 df, (21.33)
Вывод: средняя мощность выходного сигнала равна средней мощности входного сигнала, умноженной на модуль квадрата площади импульсной реакции системы (для цифровых систем - сумму квадратов коэффициентов импульсного отклика). Для центрированных случайных сигналов средняя мощность равна дисперсии сигналов. Для нецентрированных выходных сигналов:
σy2 = ![]() -
- ![]() 2 ≡ (
2 ≡ (![]() -
-![]() 2)
2) ![]() h2(t) dt. (21.35.)
h2(t) dt. (21.35.)
Функция когерентности дает оценку точности принятой линейной модели системы. Когерентность входного и выходного сигналов системы оценивается по формуле:
γxy2(f) = |Wxy(f)|2/[Wx(f)⋅Wy(f)]. (21.36)
Если функции Wx(f) и Wy(f) отличны от нуля и не содержат дельта-функций, то для всех частот f значения функции когерентности заключены в интервале:
0 ≤ γxy2(f) ≤ 1.
Для исключения дельта-функций на нулевой частоте (постоянная составляющая сигнала) определение функции когерентности производится по центрированным сигналам. Для линейных систем с постоянными параметрами функция когерентности равна 1, в чем нетрудно убедиться, если в формулу (21.35) подставить выражения Wxy и Wy, определенные через Wx в формулах (21.35-36). Для совершенно не связанных сигналов функция когерентности равна нулю. Промежуточные между 0 и 1 значения могут соответствовать трем ситуациям:
1. Система осуществляет преобразование x(t) ⇒ y(t), но в измерениях этих сигналов или одного из них присутствует внешний шум. Так, например, в сигналах, зарегистрированных с ограничением по разрядности, появляется шум квантования (округления значений).
2. Система не является строго линейной. Это может наблюдаться, например, при определенном ограничении по разрядности вычислений в цифровых системах, при накоплении ошибки в рекурсивных системах и т. п.
3. Выходной сигнал y(t) помимо x(t) зависит еще от каких-то входных или внутренних системных процессов.
Величина 1-γxy2(f) задает долю среднего квадрата сигнала y(t) на частоте f, не связанную с сигналом x(t).
21.7. Структурные схемы систем
Структурные схемы. Алгоритмы обработки сигналов в системах наглядно отображаются в виде структурных схем. Базовые элементы схем и примеры построения структурных схем приводились ранее на рис. 21.1-3. Как правило, структурные схемы соответствуют программной реализации систем и будут рассматриваться ниже применительно к цифровым системам, но не определяют аппаратной реализации в специальных радиотехнических устройствах, которая может существенно отличаться от программной реализации, особенно для аналоговых систем.
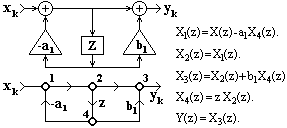
Рис. 21.7. Структурная схема и граф системы.
Графы систем. Наряду со структурной схемой система может быть представлена в виде графа, который отображает диаграмму прохождения сигналов и состоит из направленных ветвей и узлов.
Пример структурной схемы системы с передаточной функцией H(z)=(1+b1z)/(1+a1z) и графа, ей соответствующего, приведен на рисунке 21.7. С каждым i узлом графа связано значение сигнала xi(k) или его образа Xi(z), которые определяются суммой всех сигналов или их z-образов входящих в узел ветвей. В каждой ij - ветви (из узла i в узел j) происходит преобразование сигнала в соответствии с передаточной функцией ветви, например, задержка сигнала или умножение на коэффициент.
Соединения систем. Различают следующие соединения систем (рис. 21.8-10).
1. Последовательное соединение. Выходной сигнал предшествующей системы является входным для последующей. Эквивалентная передаточная функция общей системы равна произведению передаточных функций систем, в нее входящих:
H(z) = H1(z)⋅H2(z)⋅...⋅HN(z).
![]()
Рис. 21.8.
2. Параллельное соединение. Сигнал подается на входы всех параллельно соединенных систем одновременно, выходные сигналы систем суммируются. Эквивалентная передаточная функция общей системы равна сумме передаточных функций систем, в нее входящих:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
