

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В символической форме математического представления:
y(t) = s(τ) ③ h(t-τ) ≡ s(t-τ) ③ h(τ) ≡ s(t) ③ h(t).
В реальных физических системах импульсный отклик h(t) равен нулю при t<0 (реакция на выходе системы не может опережать входной сигнал) и, как правило, отличен от нуля только на определенном интервале r, по которому и ведется интегрирование или суммирование в выражениях свертки. При обработке данных на ЭВМ требований по односторонности импульсного отклика не предъявляется, равно как и по его размерам вперед и назад от нуля по координатам.
Усиление постоянной составляющей сигнала. Подадим на вход системы постоянный сигнал s(t) = A. При этом сигнал на выходе системы:
y(t) = ![]() h(τ) s(t-τ) dτ = А
h(τ) s(t-τ) dτ = А![]() h(τ) dτ = А⋅Кпс, (21.12)
h(τ) dτ = А⋅Кпс, (21.12)
т. е. площадь импульсного отклика (для цифровой системы соответственно сумма коэффициентов импульсного отклика) является коэффициентом Кпс усиления постоянной составляющей входного сигнала. Если при обработке сигналов должны изменяться только динамические характеристики их формы без изменения постоянной составляющей, а равно и различных постоянных уровней (фона, пьедесталов, региональных трендов и т. п.), то площадь импульсного отклика (сумма коэффициентов) должна нормироваться к единице.
На рис. 21.6 приведен пример выполнения свертки рассмотренной нами выше RC-цепью при нормированной к 1 площади импульсного отклика h(τ). Входной сигнал s(t) находится на постоянном фоновом значении, в данном случае - нулевом, при этом, как и следовало ожидать, площадь выходного сигнала y(t) равна площади входного сигнала.
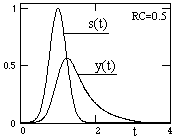
Рис. 21.6.
Усиление шумов. Критерием качества системы при использовании любого метода обработки информации можно считать выполнение целевого назначения с минимальным усилением шумов (максимальным их подавлением). Допустим, что система имеет нормированный к 1 импульсный отклик h(k). Обозначим через ε(k) аддитивный шум с математическим ожиданием M{ε(k)}= ![]() = 0 и дисперсией Dε = σ2, который в сумме с сигналом поступает на вход системы. Значения ε(k) статистически независимы и некоррелированы с сигналом. С учетом помехи во входном сигнале значение сигнала на выходе системы:
= 0 и дисперсией Dε = σ2, который в сумме с сигналом поступает на вход системы. Значения ε(k) статистически независимы и некоррелированы с сигналом. С учетом помехи во входном сигнале значение сигнала на выходе системы:
y(k) = ![]() h(n)[x(k-n)+ε(k-n)].
h(n)[x(k-n)+ε(k-n)].
Математическое ожидание значений выходного сигнала:
M{y(k)} = ![]() h(n)[x(k-n)+M{ε(k-n)}] =
h(n)[x(k-n)+M{ε(k-n)}] = ![]() h(n) x(k-n).
h(n) x(k-n).
Вычислим дисперсию распределения отсчетов выходного сигнала:
D{y(k)} = M{[![]() h(n)[x(k-n)+ε(k-n)]-M{y(k)}]2} = M{[
h(n)[x(k-n)+ε(k-n)]-M{y(k)}]2} = M{[![]() h(n) ε(k-n)]2}.
h(n) ε(k-n)]2}.
Если правую часть последнего выражения представить в виде
M{[![]() h(n) ε(k-n)]⋅[
h(n) ε(k-n)]⋅[![]() h(m) ε(k-m)]},
h(m) ε(k-m)]},
то в этом выражении математические ожидания всех членов произведения с сомножителями ε(n)ε(m) при n ≠ m равны 0 в силу статистической независимости значений шума. Остаются только члены с n = m, т. е.:
M{![]() h2(n)ε2(n)} =
h2(n)ε2(n)} = ![]() h2(n) M{ε2(n)} = Dε
h2(n) M{ε2(n)} = Dε ![]() h2(n) = σ2
h2(n) = σ2![]() h2(n).(21.13)
h2(n).(21.13)
Отсюда следует, что сумма квадратов значений нормированного импульсного отклика системы представляет собой коэффициент усиления аддитивных шумов во входном сигнале.
Пример. Сглаживающий фильтр: y(k) = 0.2![]() x(k-n).
x(k-n).
Коэффициент усиления шумов: 5 (0.22) = 0.2. Дисперсия шумов уменьшается в 1/0.2 = 5 раз.
Для систем с m входами и n выходами аналогично определяются парциальные импульсные отклики hij(t), i = {1,2, ... ,n}, j = {1,2, ... ,m}, каждым из которых отображается сигнал на i-м выходе при поступлении сигнала δ(t) на j-й вход. Полная совокупность импульсных откликов образует матрицу:
 ,
,
а выражение свертки приобретает вид:
![]() =
=![]()
![]()
![]() dτ.
dτ.
Определение импульсной реакции требуется, как правило, для рекурсивных систем, так как импульсная реакция для НЦС специального определения не требует:
h(k) =![]() b(n)δ(k-n) ≡ b(k).
b(n)δ(k-n) ≡ b(k).
Если выражение для системы известно в общей форме (21.3), определение импульсной реакции производится подстановкой в уравнение системы импульса Кронекера с координатой k = 0 при нулевых начальных условиях, при этом сигнал на выходе системы будет представлять собой импульсную реакцию системы: y(k) ≡ h(k).
Пример. Уравнение РЦС: yk = xk + 0.5yk-1. Входной сигнал: xk= δo= {1,0,0,0,...}.
Расчет выходного сигнала при нулевых начальных условиях:
yo = xo+0.5 y-1 = 1+0 = 1 = ho. y1 = x1+0.5 yo = 0+0.5 = 0.5 = h1. y2 = x2+0.5 y1 = 0+0.25 = 0.25= h2. y3 = x3+0.5 y2 = 0.125 = h3. y4 = x4+0.5 y3 = 0.0625 = h4, т. д.
Импульсный отклик системы:
hk = {1, 0.5, 0.25, 0.125, ... } ≡ (O.5)k, k = 0,1,2....
Определение импульсной реакции физических систем обычно производится подачей на вход систем ступенчатой функции uo(k) = 1 при k ≥ 0, и uo(k) = 0 при k < 0:
g(k) =![]() h(n) uo(k-n) =
h(n) uo(k-n) =![]() h(n).
h(n).
h(k) = g(k) - g(k-1), k=0,1,2,...
Функция g(k) получила название переходной характеристики системы (перехода из одного статического состояния в другое).
21.4. Передаточные функции цифровых систем
Z-преобразование является удобным методом решения разностных уравнений линейных систем. Применяя z-преобразование к обеим частям равенства (21.3), получаем:
Y(z)![]() amzm = X(z)
amzm = X(z)![]() bnzn, (21.14)
bnzn, (21.14)
где X(z),Y(z) - соответствующие z-образы входного и выходного сигнала. Из этого выражения, полагая ao = 1, получаем в общей форме функцию связи входа и выхода системы - уравнение передаточной функции системы (или системной функции) в z-области:
H(z) = Y(z)/X(z) =![]() bnzn
bnzn![]() (1+
(1+![]() amzm). (21.15)
amzm). (21.15)
Для нерекурсивных систем при am = 0:
H(z) =![]() bnzn. (21.16)
bnzn. (21.16)
При подаче на вход системы единичного импульса Кронекера δо, имеющего z-образ δ(z) = zn = 1, сигнал на выходе системы будет представлять собой импульсную реакцию системы y(k) = h(k), при этом:
H(z) ≡ Y(z) = Y(z)/δ(z) = TZ[y(k)] =![]() h(k)zk, (21.17)
h(k)zk, (21.17)
т. е. передаточная функция системы является z-образом ее импульсной реакции. При обратном z-преобразовании передаточной функции соответственно получаем импульсную характеристику системы:
h(k) ⇔ H(z). (21.18)
Если функция H(z) представлена конечным степенным полиномом, как это обычно имеет место для НЦС, то обратное z-преобразование элементарно. Передаточная функция РЦС также может быть представлена степенным полиномом прямым делением числителя на знаменатель правой части выражения (21.15), однако результат при этом может оказаться как конечным, так и бесконечным, т. е. система может иметь либо конечную, либо бесконечную импульсную характеристику. Системы с бесконечной импульсной характеристикой получили название БИХ-систем, с конечной импульсной характеристикой соответственно КИХ-систем. Нерекурсивные системы всегда имеют конечную импульсную характеристику, т. к. длительность импульсной реакции НЦС определяется окном фильтра.
Пример. Передаточная функция рекурсивной системы: H(z) = (1-z5)/(1-z).
Делением числителя на знаменатель получаем: H(z) = 1+z+z2+z3+z4. H(z) ⇔ h(n) = {1,1,1,1,1}.
Система имеет конечную импульсную характеристику.
Пример. Передаточная функция: H(z)=1/(1-2z). Методом обратного преобразования: h(n) = 2n.
Система имеет бесконечную импульсную характеристику.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 |
