
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Такая система линейных однородных уравнений имеет отличное от нуля решение только при выполнении условия
(a11- щ2) (a22- щ2) - a12 a21 = 0.
Это – квадратное уравнение относительно щ2. Обозначим его корни через ±щ1 и ±щ2. Tак как нас должны интересовать лишь вещественные решения этих уравнений, а для вещественных частей выражений (58.3) не имеет значения знак щ, то, не теряя общности, можно ограничиться лишь положительными корнями щ1 и щ2. Как видно из (58.4), коэффициенты А1 и А2 не независимы. Их отношение однозначно определяется значениями коэффициентов аik и частоты щ:
h = А2/А1 = (щ2 - a11)/a12 = a21/(щ2 – a22). (58.5)
Соответственно двум значениям частоты щ получаются и два значения отношения h, обозначаемые в дальнейшем через h1, h2.
Таким образом, мы нашли два частных решения уравнений (58.1). Первое решение:
y1 = eiщ1t, y2 = h1 eiщ1t.
Второе решение:
y1 = eiщ2t, y2 = h2 eiщ2t.
Общее решение выражается линейной комбинацией этих двух частных решений с постоянными коэффициентами, т. е.
y1 = C1eiщ1t + C2eiщ2t,
y2 = h1C1eiщ1t + C2h2 eiщ2t, (58.6)
где C1 и С2 – произвольные комплексные постоянные. Они определяют амплитуды и фазы колебаний и могут быть найдены из начальных условий:
Введем обозначения:
о1 = C1eiщ1t ; о 2 = C2eiщ2t, (58.7)
Тогда
y1 = о1 + о2 , y2 = h1о1 + h2о2. (58.8)
Координата о1 совершает гармонические колебания с частотой щ1, а координата о2 – с частотой щ2. Эти координаты называются нормальными координатами, а совершаемые ими колебания – нормальными колебаниями или модами. Таким образом, в общем случае колебание системы представляет собой суперпозицию двух нормальных колебаний с частотами щ1 и щ2.
2. Биения. Интересное явление наблюдается в симметричном случае (а11 = a22, a12 = а21), когда связь между обеими подсистемами, из которых состоит сложная система, слабая. В этом случае, ввиду малости коэффициента a12, частоты нормальных колебаний щ1 и щ2 мало отличаются друг от друга:
щ1 = √( а11 + a12 ) = √k/m ≡ щ0;
щ2 = √( а11 - a12 ) = √(k-2k12)/m ≈ щ0 - ∆щ,
где ∆щ = √ k12/m ≪ щ0.
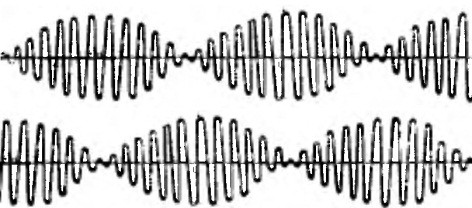
Колебания координат y1 и y2 представляются суперпозицией нормальных колебаний с мало отличающимися частотами. На протяжении нескольких колебаний обе координаты y1 и y2 колеблются почти так, как если бы связи не было. Наличие слабой связи приводит к возникновению биений, схематически изображенных на рис. 58.3. Когда амплитуда координаты y1 проходит через максимум, амплитуда координаты y2 обращается в нуль, и наоборот. Явление легко демонстрируется с помощью двух одинаковых математических маятников, между которыми установлена слабая связь. Отклонив первый маятник, наблюдают, что амплитуда его колебаний медленно убывает и второй маятник также начинает колебаться. На протяжении нескольких десятков периодов колебания первого маятника полностью затухнут, а колебания второго станут максимальными. После этого начнется затухание колебаний второго маятника. Первый маятник, наоборот, начнет раскачиваться, и по истечении такого же числа десятков периодов его амплитуда вернется к исходному значению.
Затем процесс передачи колебаний от одного маятника к другому будет повторяться, пока в результате действия сил трения колебания не прекратятся.
§59. Волновое движение.
При изучении механических колебаний, результирующее действие среды учитывалось путем введения силы трения, действие которой приводит к диссипации механической энергии и затуханию собственных колебаний системы. Однако это не полностью отражает истинную картину процессов, происходящих в самой среде. В действительности, энергия, передаваемая колеблющимся телом среде, приводит не только к увеличению кинетической энергии хаотического движения частиц, из которых эта среда состоит, но и вызывает направленное движение. Частицы среды начинают совершать вынужденные колебания. Данная область среды периодически деформируется, вызывая упругие напряжения, которые действуют как на колеблющееся тело, так и на примыкающие области, вынуждая их периодически деформироваться, и т. д.
Итак, в среде колебания не остаются локализованными, а передаются на области, находящиеся от источника колебаний все дальше и дальше, вовлекая их в колебательное движение. Описанный процесс распространения колебаний в среде называется волновым движением. Распространяющиеся колебания называются волной.
Наличие упругой среды не является необходимым условием распространения всяких колебаний. Например, колебания электрических и магнитных полей могут распространяться не только в среде, но и в вакууме.
В физике волнами называют всякие распространяющиеся в пространстве возмущения состояния вещества и поля.
Так, например, звуковые волны в газах или жидкостях представляют собой распространение колебаний давления в этих средах, а электромагнитные волны – распространение колебаний напряженностей электрического и магнитного поля.
Механические возмущения, распространяющиеся в упругой среде, называются упругой волной. Если амплитуды колебаний частиц среды невелики, то такие упругие волны называются звуковыми, или акустическими.
В упругой волне не происходит переноса вещества.
В среде, где распространяется упругая волна, частицы среды совершают вынужденные колебания вокруг своих положений равновесия с различными начальными фазами. Обозначим отклонения частиц от положений равновесия в волне, распространяющейся в упругой среде (упругая волна), через букву о. Они различны в разных точках (r) среды и меняются во времени:
о = о(r, t). (59.1)
Закон, выражающий зависимость �� от пространственно-временных координат, есть закон волнового движения и называется уравнением волны. Оно может даваться разными математическими выражениями.
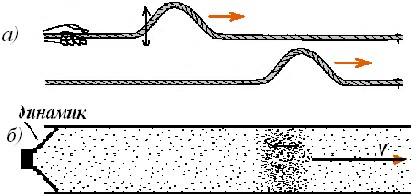
В зависимости от направления колебания в волне частиц среды, волны бывают продольными и поперечными. В продольных волнах частицы колеблются вдоль распространения волны. В произвольный момент времени продольная волна представляет собой последовательность уплотнений и разрежений среды (рис. 59.1б). Важным примером продольной волны является звуковая волна. Если колебания частиц среды совершаются в плоскости, перпендикулярной к направлению распространения волны, то такие волны называются поперечными (рис. 59.1а). В поперечной упругой волне нет уплотнений и разрежений среды, то есть отсутствуют деформации сжатия и растяжения. Здесь мы имеем дело с деформациями сдвига. Последние могут образоваться в средах, обладающих упругостью формы, т. е. в твердых телах. Поэтому скорость распространения поперечных упругих волн связана с модулем сдвига K и объемной плотностью массы с вещества:
u = √(K/с). (59.2)
Продольные волны связаны с объемной деформацией среды, поэтому могут образоваться как в твердых телах, так и в жидкостях и газах. Скорость продольных волн в стержне связана с модулем Юнга среды E:
u = √(E/с). (59.2')
Существуют волновые движения, содержащие в себе компоненты и продольных, и поперечных колебаний, то есть они не продольны, не поперечны. Например, в возникающих на поверхности воды так называемых гравитационных волнах частицы жидкости совершают движения по окружности с радиусом, убывающим с глубиной.
Как и колебание, любая волна может быть представлена в виде наложения гармонических (меняющихся по закону синуса или косинуса) волн. Ограничимся поэтому исследованием гармонических волн.
Рассмотрим случай простейшей одномерной гармонической волны, когда волна распространяется вдоль оси X. Одномерная упругая волна образуется в полубесконечной тонкой струне (стержне), если ее конец О привести в колебания по закону
о(0,t) = Asin(щt + д).
Вдоль струны (см. рис.59.1) (стержня) будет распространяться упругая волна. Скорость распространения колебаний u, которая называется скоростью волны, не следует путать со скоростью колебательного движения частиц в волне.
Через определенное время t1= x/u возбужденные в точке О колебания достигнут точки М. Следовательно, если потери энергии при распространении отсутствуют, то колебания в точке М будут иметь ту же частоту щ и амплитуду А, но будут «отставать» от колебаний в точке О на время t1:
о(x, t) = A sin[щ(t – t1) + д] = A sin[щt – щx/u + д]. (59.3)
В отличие от колебательного движения, волновое движение наделено как временной, так и пространственной периодичностью.
Период T волны в произвольной точке среды x –это период колебаний частицы в этой точке: о(x, t) = о(x, t + T), откуда
T = 2р/щ = 1/н. (59.4)
Циклическая (щ) и линейная (н) частоты колебания частицы в волне называются соответственными частотами волны.
Расстояние между ближайшими точками, колеблющимися в данный момент в одинаковой фазе, называется длиной волны л, которая представляет величину пространственного периода волны: о(x, t) = о(x + л, t), откуда
лщ/u = 2р,
или
л = н/u = uT. (59.5)
Значит, длина волны – это расстояние, которое проходит волна за один период колебаний.
Учитывая полученные соотношения, запишем уравнение (59.3) в виде
о(x, t) = A sin[2р(t/T – x/л) + д],
или
о(x, t) = A sin(щt – kx + д), (59.6)
где
k = 2р/л (59.7)
называется волновым числом (количество волн, умещающихся в 2р см).
Величина
Ф(x, t) = щt – kx + д (59.8)
называется фазой волны, а Ц(x, 0) = - kx + д – начальная фаза колебаний в данной точке x. Значит, колебания в точках x1 и x2 отличаются только начальными фазами, разность между которыми равна

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
