
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Представим реализации, полученные при измерении ![]() и
и ![]() , в виде
, в виде
![]() (18.12)
(18.12)
где ![]() и
и ![]() — случайные составляющие, обусловленные источником поля,
— случайные составляющие, обусловленные источником поля, ![]() и
и ![]() — случайные составляющие, обусловленные неточностью работы аппаратуры и другими факторами. Естественно предположить, что измеряемое поле существует объективно и его свойства не зависят от измерителя. Помимо этого обстоятельства очевидно, что погрешности каждого измерителя независимы друг от друга. Тогда легко показать
— случайные составляющие, обусловленные неточностью работы аппаратуры и другими факторами. Естественно предположить, что измеряемое поле существует объективно и его свойства не зависят от измерителя. Помимо этого обстоятельства очевидно, что погрешности каждого измерителя независимы друг от друга. Тогда легко показать
 (18.13)
(18.13)
Здесь члены

и

равны нулю; черта над произведением означает среднее по времени.
Следовательно, при таком способе получения и обработки реализаций в оценку для корреляционной функции ![]() x(tj, tk) входят лишь составляющие, являющиеся общими для обоих измерителей.
x(tj, tk) входят лишь составляющие, являющиеся общими для обоих измерителей.
Для иллюстрации этого положения приведем результаты статистического моделирования. Из формулы следует, что при статистической независимости помехи и других воздействий от свойств изучаемого процесса, а также при статистической независимости помехи в одной точке измерения от помехи в другой точке измерения можно принципиально точно получить значения корреляционной функции нестационарного процесса. Таких значений может быть получено сколь угодно много, если это удается при проведении эксперимента.
2. Влияние помех. Однако все сказанное справедливо лишь при бесконечном времени наблюдения. На практике часто имеют дело с конечными интервалами наблюдения и, следовательно, имеет смысл оценить, каким образом помеха и другие причины влияют на точность получения оценок. Для этой цели были проведены расчеты на вычислительной машине по схеме (рис. 18.2).
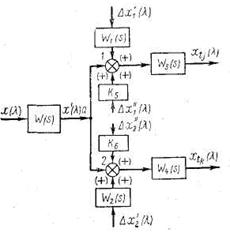
Рис. 18.2
Случайный процесс х'(λ), сформированный из «белого» шума Х(λ) фильтром с передаточной функцией W(s)=k/(Ts+l), поступает на два аналога измерителей с передаточными функциями W3(s) = W4(s) = 1. В точках 1 и 2 с процессом х'(λ) суммируются процессы ∆х′1(λ) и ∆х′2(λ), прошедшие через фильтры с передаточными функциями

а также процессы ∆х′′1(λ) и ∆х′′2(λ), прошедшие через элементы, коэффициенты усиления которых равны k5=k6=1. Процессы х′1(λ), ∆х′1(λ), ∆х′2(λ), ∆х′′1(λ), ∆х′′2(λ) формируются на ЭВМ при помощи программ случайных чисел. Каждая последовательность чисел статистически независима от других. Спектральная плотность процессов есть спектральная плотность «белого» шума с уровнем ∆t и интервалом частот
![]()
где ∆t — интервал дискретности при решении задачи на ЭВМ. Процесс х'(λ) будем считать соответствующим изучаемому источнику, а процессы ∆х(λ) — помехе. Процессы ![]() и
и![]() будут соответственно процессами на выходе двух измерителей. В данном случае следует считать, что оба измерителя находятся в одной точке поля, так как при оценке влияния ошибок измерения данное обстоятельство не является существенным. Исходя из вышеизложенного, корреляционная функция
будут соответственно процессами на выходе двух измерителей. В данном случае следует считать, что оба измерителя находятся в одной точке поля, так как при оценке влияния ошибок измерения данное обстоятельство не является существенным. Исходя из вышеизложенного, корреляционная функция  должна быть близкой к автокорреляционной функции процесса х'(λ) в точке «а» (рис. 18.2).
должна быть близкой к автокорреляционной функции процесса х'(λ) в точке «а» (рис. 18.2).
Результаты расчета при k = 20, kl = k2 = 40, k5 = k6=1, ∆t=0,01, T = 0,l, T1=T2=0,5, ξ = 0,5 и N0 = 6000— числе значений в реализации, даны на рис. 18.3.
 Рис. 18.3
Рис. 18.3
Из анализа результатов расчета следует, что взаимная корреляционная функция ![]() практически не отличается на интервале корреляции от автокорреляционной функции изучаемого процесса, что и следовало ожидать. В то же время автокорреляционная функция
практически не отличается на интервале корреляции от автокорреляционной функции изучаемого процесса, что и следовало ожидать. В то же время автокорреляционная функция ![]() процесса
процесса ![]() существенным образом отличается от автокорреляционной функции
существенным образом отличается от автокорреляционной функции  изучаемого процесса, так как в этом случае не происходит исключения помехи при обработке.
изучаемого процесса, так как в этом случае не происходит исключения помехи при обработке.
18.4. Оценка качества систем научных исследований, совершенствующихся в процессе испытаний
1. Постановка задачи. Как уже отмечено, выходом системы научных исследований может быть набор характеристик, определяющих свойства и поведение исследуемой системы. Обычно свойства и поведение системы вытекают из задач, которые ставятся перед ней. Если система решает эти задачи, то, следовательно, она обладает необходимым качеством. Если система находится в эксплуатации, то оценить ее качество можно, обработав с помощью известных методов математической статистики результаты эксплуатации. Более сложной задачей является получение оценки качества, когда система отрабатывается, совершенствуется на этапе испытаний в натурных условиях. Именно эту задачу мы будем решать в дальнейшем, при построении оценки качества системы научных исследований.
Рассмотрим задачу оценки качества автоматических систем научных исследований, совершенствующихся в процессе испытаний. Под мерой качества будем понимать вероятность достижения системой некоторой цели, а натурные испытания будем рассматривать как последовательность опытов, предназначенных для того, чтобы по результатам каждого из них можно было внести усовершенствование в систему и тем самым улучшить качество ее работы. Улучшение качества системы научных исследований от опыта к опыту есть ее совершенствование. Анализ результатов каждого опыта выполняет экспериментатор, который осуществляет целенаправленные действия для улучшения системы и, следовательно, выступает в качестве «учителя», а испытуемая система подвергается совершенствованию, или «обучению». Сочетание обучаемой системы научных исследований и экспериментатора, находящихся во взаимосвязи, следует рассматривать как кибернетическую систему, т. е. как объединенную информационным процессом совокупность элементов и подсистем живой и неживой природы, действия которых направлены для достижения некоторого качества. Взаимосвязь обучаемой системы и экспериментатора заключается в том, что экспериментатор, анализируя результаты опыта, реализует мероприятия, направленные на улучшение качества системы научных исследований, и подготавливает следующий опыт. Суть решаемой задачи состоит в построении математической модели процесса изменения качества обучаемой системы научных исследований и получении оценки качества.
Процесс «обучения» системы при испытаниях можно изобразить условно (рис. 18.4).
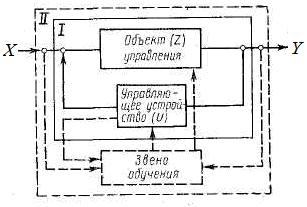
Рис.18.4
Испытуемая система I разделена на объект управления и управляющее устройство;
Х = Х(х1 ..., хk)—k-мерный вектор, определяющий множество входных переменных системы;
Z = Z(z1, ..., zn) — n-мерный вектор возможных состояний объекта, причем Zν+1= fs{X, Zν), т. е. состояние объекта зависит от входных переменных и может зависеть от предыдущего состояния системы;
U=U(u1, ..., ur)—r-мерный вектор управления;
Y=Y(y1, ..., ут) — m-мерный вектор выходных координат системы, причем
Y=fy(X, Z,U); (18.14)
Ω(X), Ω(Z), Ω(Y) и Ω(U) являются соответственно пространствами координат возможных входных переменных, состояний, выходных переменных и алгоритмов управления.
На этапе испытаний в качестве «звена обучения» выступают cпециалисты, участвующие в проектировании, моделировании и обработке результатов испытаний, которые, анализируя характеристики X, Z, U, Y системы, производят соответствующие изменения U и Z для достижения требуемой величины критерия качества.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 |
