

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
147. Максимальную эксплуатационную перегрузку при маневре ВС с убранной взлетно-посадочной механизацией следует определять следующим образом:
nэу max(а) = 3,8 при m < 8000 кг,
nэу max(а) = 2,5 при m > 27500 кг.
Для промежуточных значений полетной массы m величина nэу max(а) определяется по формуле:
Меньшее значение маневренной перегрузки может быть принято только тогда, когда конструктивные или аэродинамические особенности ВС гарантируют непревышение этого значения в полете.
Примечание: для ВС, у которых V max э < 100 м/с, величина nэу max(а) устанавливается изготовителем и согласовывается с компетентным органом государства-изготовителя с представлением соответствующих обоснований.
148. Минимальная эксплуатационная перегрузка при маневре с убранной взлетно-посадочной механизацией должна быть принята по абсолютной величине не меньше чем 1,00, т. е. nэу min(а)< - 1,00.
149. Максимальную и минимальную эксплуатационные перегрузки при маневре ВС с выпущенной взлетно-посадочной механизацией следует принимать равными соответственно:
nэу max(а) = 2,00; nэу min(а) = 0.
150. В Руководстве по летной эксплуатации в качестве максимальной и минимальной допустимых в эксплуатации перегрузок при маневре должны быть записаны перегрузки:
nу max < nэу max (а),
nу min > nэу min(а).
151. Максимальная и минимальная эксплуатационные перегрузки при полете в неспокойном воздухе nэу max(б) и nэу min(б) с убранной взлетно-посадочной механизацией должны определяться для всех скоростей полета V вплоть до Vmax_max по следующим формулам:
nэу max(б) =nу г. п.+ /\ n;
nэу min(б) = nу г. п.- /\ n;
роVW
/\ n = 0,5 kcaу ------
gmlS
1-e-л
k = 0,8 ----------;
л
РнL
л = 0,5 caу ------,
mlS
где, nу г. п. - нормальная перегрузка установившегося горизонтального полета (может быть приближенно принято значение nуг. п = 1,00);
c aу - производная коэффициента нормальной аэродинамической силы ВС по углу атаки (в радианах), определяемая по данным испытаний в аэродинамической трубе жесткой модели ВС при числе М, соответствующем рассматриваемой скорости полета;
S - площадь крыла;
Ро и рн - плотность воздуха (соответственно) у земли и на рассматриваемой высоте полета;
g - ускорение свободного падения;
L - длина участка нарастания порыва, следует принимать L=30 метров.
Эффективную индикаторную скорость вертикального порыва W необходимо определять следующим образом.
На скорости, равной или меньшей V max э,
при Н < 10000 метров
15 Vmax э
W = --------, но не более 20 м/с;
V
при Н > 20000 метров
10Vmax э
W = --------, но не более 12 м/с;
V
На скорости Vmax max
при Н < 10000 метров W = 10 м/с;
при Н > 20000 метров W = 6 м/с.
При 10000 м < Н < 20000 м следует пользоваться линейной интерполяцией между значениями W для Н = 10000 и 20000 метров. Для скоростей полета между V max э и Vmax max значение W также следует определять, применяя линейную интерполяцию. Если по каким-либо соображениям устанавливается скорость, ниже которой не следует длительно летать, или если устанавливается (рекомендуется) скорость, ниже которой не следует проводить полет в сильную болтанку, и какая-либо из этих скоростей больше, чем 0,75 Vmax э, то на этой скорости необходимо произвести дополнительную проверку прочности при указанных выше предельных значениях W (20 м/с при Н < 10000 метров, 12 м/с при Н > 20000 метров).
Значение W во всех случаях следует ограничить дополнительным условием: су, определенный по формуле:
n эmax (б) gm/S
су = ---------------
g
не должен превышать 1,5 су max, если характеристика су = f(а) ВС имеет ярко выраженный максимум (су mах), и 1,5 су или су2 (что больше), если характеристика су= f(а) ВС не имеет такого максимума.
Здесь су1 - коэффициент нормальной аэродинамической силы ВС при угле атаки a1 (соответствующем началу нелинейной части характеристики су= f(а), a су2 - коэффициент нормальной аэродинамической силы при угле атаки а2 = 2a1.
Примечание: значения су = f(а) следует брать при положении руля высоты (стабилизатора), соответствующем балансировке в горизонтальном полете при рассматриваемых значениях Н, V и m.
152. Перегрузки при полете в неспокойном воздухе nэу maх(б) и nэу min(б) с выпущенной взлетно-посадочной механизацией следует также определять по формулам глав 181-185, но при этом в выражении для /\n нужно принимать W = 10 м/сек, а в качестве скорости брать максимальную скорость, при которой разрешен полет ВС в данной конфигурации.
27. Случай нагружения крыла ВС
153. В полетных случаях нагружения помимо нормальной аэродинамической силы крыла учитывается продольная аэродинамическая сила. Во всех случаях нагружения должны учитываться силы тяжести и инерционные силы крыла и находящихся в нем грузов, распределенных по наиболее невыгодным вариантам в отношении прочности тех или других элементов конструкции. Для ВС в целом равновесие сил и моментов достигается приложением аэродинамической нагрузки на несущие части ВС, тяги двигателей, силы тяжести ВС и инерционных сил поступательного и вращательного движений. Если с крылом конструктивно связаны другие части ВС, крыло должно проверяться также на нагрузки от этих частей во всех нормируемых для них случаях.
Примечание: для крыла разрешается приближенно принимать направление сил тяжести и инерционных сил противоположным направлению равнодействующей аэродинамической нагрузки на крыло.
154. В маневренных случаях нагружения задается перегрузка в центре тяжести ВС. Маневр следует считать установившимся и эксплуатационную нормальную аэродинамическую нагрузку на крыло (на ВС без горизонтального оперения) определять по формуле:
? кр = nэуgm - Р г. о ур
где, P г. o. ур - уравновешивающая нагрузка на горизонтальное оперение, взятая со знаком плюс, если она действует вверх. Кроме nэу в каждом отдельном маневренном случае нагружения задается одна из двух величин: скоростной напор q или су (су ВС при отклонении руля высоты или стабилизатора на балансировочный угол). Вторая величина находится из условия:
суq
nэ = -------,
gm/S
Значения су и q (следовательно, на данной высоте полета и числа М) определяют угол атаки а.
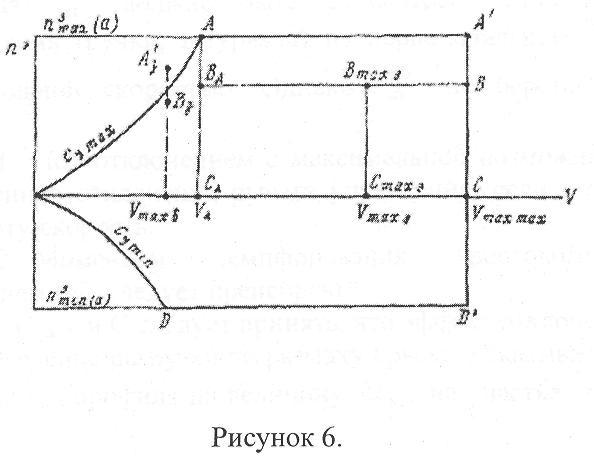
155. Для проверки прочности крыла с убранной взлетно-посадочной механизацией рассматриваются следующие случаи нагружения: A, A', D, D', ВА, СА, Вmах э, Сmах Э, В, С.
Указанные случаи нагружения ВС (рисунок 6), показывают сочетание значений маневренных перегрузок и скоростей полета.
Для каждого случая нагружения значения эксплуатационной перегрузки nэу, скоростного напора q и коэффициента нормальной аэродинамической силы ВС су. Величина су mах определяется следующим образом.
Если характеристика су = f(a) не имеет ярко выраженного одиночного максимума:
в качестве су mах следует принять су, соответствующего углу атаки при сваливании (ас). Для предварительных расчетов можно принимать в этом случае меньшую из двух величин: су, соответствующий первому максимуму, и су, соответствующий углу 2а1 где а1 - угол атаки, начиная с которого характеристика су= f(a)становится нелинейной;
су min следует определять аналогичным образом.
В случаях ВА, СА, Вmах э, Сmах э, В и С необходимо рассматривать нагружение крыла с элеронами, отклоненными для создания левого (правого) крена.
В случаях ВА и СА следует принимать элероны, отклоненными на угол, лимитируемый только эффективным конструктивным ограничением, максимальной мощностью бустера или максимальным эксплуатационным усилием пилота.
В случаях Вmах э и Сmах э угол отклонения элеронов следует принимать таким, чтобы угловая скорость установившегося вращения ВС вокруг продольной оси wх, определенная с учетом сжимаемости воздуха и упругости конструкции крыла, была не меньше угловой скорости wх, достигаемой в случаях ВА и СА соответственно. В случаях В и С угловая скорость wх, определенная как указано выше, должна быть не меньше 0,3 значения wх, также достигаемого в случаях ВА и СА соответственно.
Однако и в случаях Вmах э, Сmах э, В и С отклонение элеронов не должно быть больше значения, лимитируемого эффективным конструктивным ограничением, максимальной мощностью бустера или максимальным эксплуатационным усилием пилота.
Момент вращения вокруг продольной оси, вызванный отклонением элеронов в случаях ВА, Вmах э и В, уравновешивается следующим образом:
1) должно быть рассмотрено установившееся вращение вокруг продольной оси, т. е. момент вращения уравновешивается моментом демпфирующих сил от вращения с угловой скоростью wх и моментом аэродинамических сил, вызванных деформациями конструкции;
2) должно быть рассмотрено неустановившееся вращение ВС вокруг продольной оси, т. е. момент вращения уравновешивается моментом инерционных сил, обусловленных угловым ускорением ВС относительно продольной оси, демпфирующих сил, вызванных угловой скоростью (если отклонение элеронов не является мгновенным), и аэродинамических сил, возникающих от деформаций конструкции. Для определения величины углового ускорения dwх должно быть рассмотрено отклонение рычага
----
Dt
поперечного уравнения (ручки, штурвала) из первоначального положения с максимально возможной скоростью. Однако dwх
----
Dt
не берется больше 3,0 рад/сек2.
Примечание 1: под отклонением с максимальной возможной скоростью понимается мгновенное отклонение рычага управления, если нет устройства, ограничивающего эту скорость.
Примечание 2: моментом демпфирования хвостового оперения, вызванным вращением ВС, следует пренебречь.
В случаях СА, Сmах э и С следует принять, что эффект отклонения элеронов не изменяет распределение нагрузки по размаху крыла, а сказывается только на изменении значения сm0 профиля на величину /\сm0 на участке крыла, занятом элеронами.
156. Для проверки прочности крыла с выпущенной взлетно-посадочной механизацией на максимальной скорости полета, разрешенной для данной конфигурации, следует рассмотреть случаи нагружения А3' и В3 (рисунок 6).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 |
