
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() .
.
Число оборотов в единицу времени называется частотой вращения. Значит, частота равна
![]() .
.
Пусть за время ![]() величина угловой скорости изменилась на
величина угловой скорости изменилась на ![]() . Предел отношения изменения угловой скорости к промежутку времени, за который это изменение произошло, при промежутке времени, стремящемся к нулю, называется угловым ускорением, т. е., по определению, угловое ускорение есть векторная величина, равная производной от угловой скорости по времени:
. Предел отношения изменения угловой скорости к промежутку времени, за который это изменение произошло, при промежутке времени, стремящемся к нулю, называется угловым ускорением, т. е., по определению, угловое ускорение есть векторная величина, равная производной от угловой скорости по времени:
![]() .
.
При вращательном движении тела выделяют и линейную скорость. Это скорость, с которой точка движется по окружности. Величина линейной скорости, т. е. ее модуль, любой точки вращающегося тела определяется угловой скоростью и расстоянием рассматриваемой точки от оси вращения. Пусть за время ![]() тело повернулось на малый угол
тело повернулось на малый угол ![]() (рис. 1.1.4).
(рис. 1.1.4).
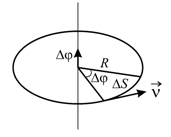
Рис. 1.1.4
Точка тела, находящаяся от оси вращения на расстоянии ![]() , проходит при этом путь
, проходит при этом путь  , и модуль линейной скорости составляет
, и модуль линейной скорости составляет
![]() .
.
Рассматривая радиус ![]() как радиус-вектор точки, последнее равенство можно записать в векторном виде
как радиус-вектор точки, последнее равенство можно записать в векторном виде ![]() . Но
. Но ![]() . Значит, действительно
. Значит, действительно  . Направление вектора
. Направление вектора ![]() определяется правилом правого винта, т. е. вектор
определяется правилом правого винта, т. е. вектор ![]()
![]() направлен по касательной к окружности в сторону вращения.
направлен по касательной к окружности в сторону вращения.
Пример 5. Найти радиус вращающегося колеса, если известно, что линейная скорость ![]() точки, лежащей на ободе, в 2,5 раза больше линейной скорости
точки, лежащей на ободе, в 2,5 раза больше линейной скорости ![]() точки, лежащей на 5 см ближе к оси колеса.
точки, лежащей на 5 см ближе к оси колеса.
Решение. Угловая скорость всех точек вращающегося колеса одинакова и связана с линейной скоростью любой точки колеса соотношением ![]() , где
, где ![]() – расстояние точки от оси вращения. Обозначим через
– расстояние точки от оси вращения. Обозначим через ![]() радиус обода колеса. Тогда расстояние до оси от точки, лежащей на 5 см ближе к оси, будет
радиус обода колеса. Тогда расстояние до оси от точки, лежащей на 5 см ближе к оси, будет 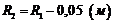 . В силу равенства угловых скоростей обеих точек получаем:
. В силу равенства угловых скоростей обеих точек получаем: ![]() . По условию,
. По условию, ![]() . Отсюда
. Отсюда
![]() .
.
Пример 6. Колесо, вращаясь равноускоренно, достигло угловой скорости  через
через ![]() оборотов после начала вращения. Найти угловое ускорение колеса.
оборотов после начала вращения. Найти угловое ускорение колеса.
Решение. При равнопеременном вращательном движении имеют место следующие два уравнения движения:

По условию ![]() , и уравнения принимают вид:
, и уравнения принимают вид: ![]() и
и ![]() . Решая совместно эти уравнения и учитывая, что
. Решая совместно эти уравнения и учитывая, что ![]() , получаем окончательно:
, получаем окончательно:![]() .
.
1.1.5. Нормальное и тангенциальное ускорения
Для того чтобы тело двигалось криволинейно, линейная скорость каждой точки тела должна постоянно менять свое направление. При любом положении точки это направление есть направление касательной к траектории. Значит, точка должна постоянно испытывать ускорение, направленное к центру кривизны, т. е. перпендикулярно направлению скорости. Это ускорение называется нормальным.
Если криволинейное движение неравномерное и линейная скорость меняется не только по направлению, но и по величине, значит, движущееся тело испытывает ускорение и в направлении вектора скорости, т. е. в направлении касательной к траектории. Это ускорение называется тангенциальным.
Получим выражения для нормального и тангенциального ускорений. Рассмотрим плоское движение, т. е. такое, при котором все участки траектории частицы лежат в одной плоскости (рис. 1.1.5). Вектор ![]() задает скорость частицы (точки)
задает скорость частицы (точки) ![]() в момент времени
в момент времени ![]() . За время
. За время ![]()
![]() точка перешла в положение
точка перешла в положение ![]() и приобрела скорость, отличную от
и приобрела скорость, отличную от ![]()
![]() как по модулю, так и по направлению и равную
как по модулю, так и по направлению и равную ![]() . Перенесем вектор
. Перенесем вектор ![]() в точку
в точку ![]() и найдем изменение скорости
и найдем изменение скорости ![]() . Разложим вектор
. Разложим вектор ![]() на две составляющие. Для этого из точки
на две составляющие. Для этого из точки ![]() по направлению скорости
по направлению скорости ![]() отложим вектор
отложим вектор ![]() , равный по модулю
, равный по модулю ![]() . Очевидно, что вектор
. Очевидно, что вектор ![]() , равный
, равный ![]() , определяет изменение скорости по модулю за время
, определяет изменение скорости по модулю за время ![]() :
:  . Вторая же составляющая вектора
. Вторая же составляющая вектора ![]() вектор
вектор ![]() характеризует изменение скорости за время
характеризует изменение скорости за время ![]() по направлению.
по направлению.
Рис. 1.1.5
Тангенциальная составляющая ускорения:
 ,
,
т. е. равна производной по времени от модуля скорости (характеризует быстроту изменения скорости по модулю).
Допустим, что точка ![]() достаточно близка к точке
достаточно близка к точке ![]() , вследствие чего участок криволинейной траектории можно считать дугой окружности радиуса
, вследствие чего участок криволинейной траектории можно считать дугой окружности радиуса ![]() , причем дуга
, причем дуга ![]() мало отличается от хорды
мало отличается от хорды ![]() . Тогда
. Тогда ![]() , откуда следует
, откуда следует ![]() . Но
. Но ![]() , значит
, значит  . При
. При ![]() имеем
имеем ![]() . Поскольку это так, то
. Поскольку это так, то  стремится к нулю.
стремится к нулю. ![]() – равнобедренный, из чего следует, что
– равнобедренный, из чего следует, что ![]() между
между ![]() и
и ![]() стремится к прямому. Следовательно, при
стремится к прямому. Следовательно, при ![]() векторы
векторы ![]() и
и ![]() оказываются взаимно перпендикулярными. Вектор
оказываются взаимно перпендикулярными. Вектор ![]() направлен по касательной к траектории, значит, вектор
направлен по касательной к траектории, значит, вектор ![]() направлен к центру кривизны траектории. Модуль этой составляющей ускорения будет равен
направлен к центру кривизны траектории. Модуль этой составляющей ускорения будет равен

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 |
