
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
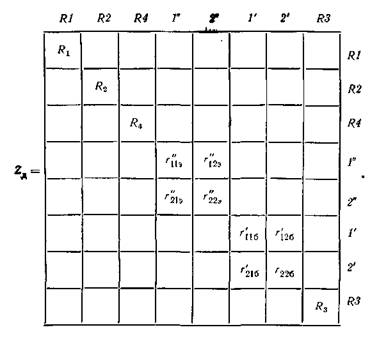
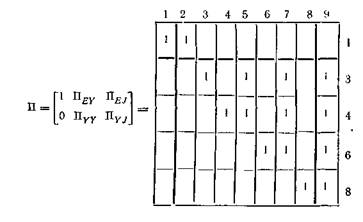
При выводе уравнений сечений необходимо дугу Е источника напряжения e(t) и разомкнутую дугу Q ввести в дерево, а также представить транзисторы g-параметрами и резисторы— проводимостями. Выбрав дерево, как показано на рис. 3.5, запишем матрицу сечений с разбиением на блоки:
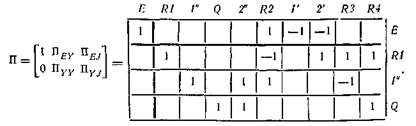
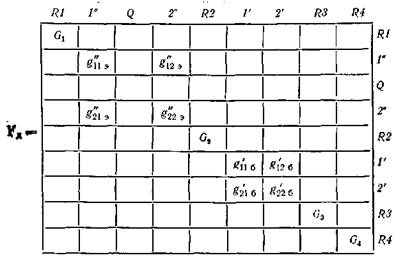
Как видно, субматрицы ПEJ и ПYJ отсутствуют, так как граф не содержит дуг независимых источников тока (j-дуг). Матрица проводимостей дуг полюсных графов компонентов YД, входящая в компонентное уравнение iY =YДиY, записывается в виде:
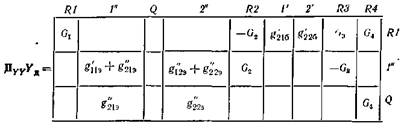
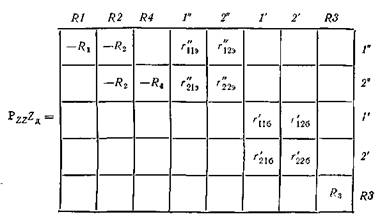
Матрично-векторные параметры уравнения сечений![]()
определяется формулами:
![]()
![]()
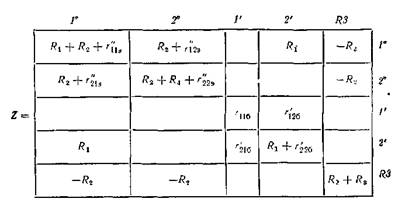
Перемножив соответствующие матрицы, получим:
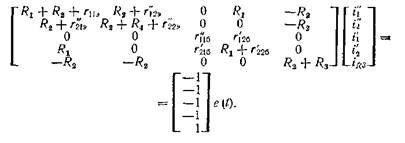
Таким образом, имеем уравнения сечений в матричной форме:
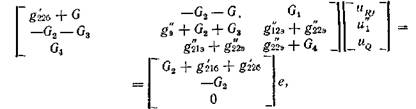
где
![]()
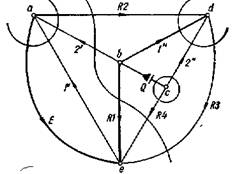
Рис. 3.5. Граф транзисторной схемы, используемый для формирования уравнений сечений.
Матрицы Y и Y′ можно также записать по приведенным ранее правилам. Например, проводимость G2 записывается на пересечении строк и столбцов соответствующих сечениям R1 и 1", так как дуга R2 инцидентна этим сечениям, причем симметрично от главной диагонали проводимость G2 записывается со знаком минус вследствие противоположности направлений сечений R1 и 1' относительно дуги R2. Взаимная проводимость g′′12э дуги 1" транзистора Т2 записывается на пересечении второй строки с вторым и третьим столбцами, так как дуга 1" инцидентна сечению 1", а дуга 2" — сечениям 1" и Q. Поскольку направление дуги 2" совпадает с инцидентными ей сечениями 1" и Q, то g′′12э везде вписывается со знаком плюс. Аналогично вписываются в матрицу проводимости и другие параметры компонентов. Собственная проводимость g′11б дуги 1' транзистора T1 не вошла в матицы Y и Y', так как эта дуга не инцидентна y-сечениям.
Тройные матричные произведения удобно также получать суммированием строк и столбцов матрицы Y Д. Так как в выражении
Y = ПYYYДПtYY ненулевые элементы матрицы ПYY равны ±1, то умножение YД на ПYY слева соответствует алгебраическому суммированию строк, а умножение на ПtYY справа — алгебраическому суммированию столбцов матрицы YД. Какие именно строки и столбцы и с каким знаком суммируются указывают ненулевые элементы соответствующих строк матрицы ПYY. При получении матрицы
Y' = ПYYYДПtЕY операции над строками матрицы YД определяются матрицей ПYY, а операции над столбцами — матрицей ПЕY.
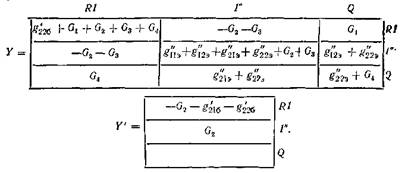
В рассматриваемом примере для получения первой строки произведения ПYYY необходимо из первой строки матрицы Yд вычесть пятую и прибавить к ней седьмую, восьмую и девятую строки. Вычитая восьмую строку из суммы второй, четвертой и пятой, получаем вторую строку произведения ПYYYд. Наконец, сумма третьей, восьмой и девятой строк дает третью строку произведения ПYYYд. В результате имеем:
Выполнив такие же операции над столбцами этой матрицы, получим матрицу Y. Для определения матрицы Y' необходимо из пятого столбца произведения ПYYYд вычесть шестой и седьмой столбцы и результат записать как единственный (в данном случае) столбец матрицы Y'.
Искомое напряжение иq можно определить из решения уравнения сечений, например по правилу Крамера :
![]()
где ∆ — определитель матрицы Y; ∆13 и ∆25 — алгебраические дополнения (индексы алгебраических дополнений соответствуют естественной порядковой нумерации строк и столбцов матрицы Y).
При формировании уравнений контуров фундаментальное дерево должно, как и ранее, включать дугу Е источника напряжения, но разомкнутую дугу Q целесообразно представить как j-дугу и оставить ее в дополнении. Отвечающее этим требованиям дерево и определяемая им совокупность независимых контуров показаны на рис. 3.6.
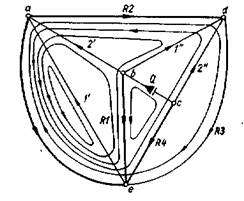
Рис.3.6. Граф транзисторной схемы, используемый для формирования уравнений контуров.
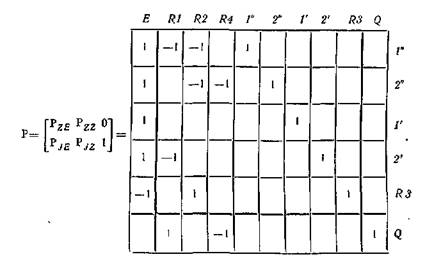
Матрица контуров записывается в виде:
Дуги полюсных графов всех компонентов должны быть z-дугами, для этого транзисторы представляются r-параметрами, а резисторы — сопротивлениями. Матрица ZД входящая в компонентное уравнение uZ = ZДiZ, запишется следующим образом:
Матрично-векторные параметры уравнения контуров![]()
определяются формулами:
![]()
![]()
(так как j = 0). Матрицу Z получим путем алгебраических операций над строками и столбцами матрицы ZД, которые определяются ненулевыми элементами строк матрицы Pzz:
Таким образом, уравнение контуров получаем в виде:
Определив из этого уравнения вектор токов хорд


искомое напряжение иQ найдем по формуле для 
![]()
Так как ![]()
![]()
Матрица Z' получается из ZД суммированием ее строк в соответствии с PJZ и столбцов в соответствии с Pzz, т. е.

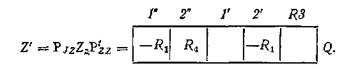
На основании полученной матрицы Z' находим:
![]()
3.7. Электромеханическая система
Рассмотрим в качестве еще одного примера электромеханическую систему (рис. 3.7, а), состоящую из двигателя постоянного тока, трех упругих валов и двух маховиков. Граф системы показан на рис. 3.7, б, где 1— дуга приложенного напряжения (е-дуга); 2, 3 — дуги полюсного графа двигателя; 4,6,8 — дуги валов; 5,7 — дуги маховиков и 9 — дуга момента нагрузки μ9(j-дуга).
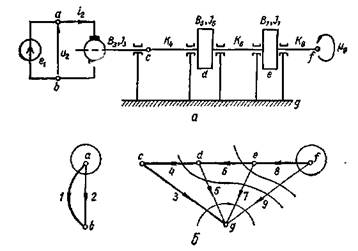
Рис. 3.7. Электромеханическая система (а) и ее граф (б)
Пусть требуется сформировать математическую модель системы в однородной системе координат так, чтобы переменными в уравнениях были продольные величины φ3, φ4, φ6, φ8 (углы скручивания валов, в том числе и вала двигателя φ 3). Естественно исходить из системы сечений, стремясь включить дуги валов и выходную дугу двигателя в дерево. Так как граф несвязный, то деревья выбираем в каждом из двух его компонентов связности, причем, наряду с дугами 3, 4, 6, 8, включаем в лес дугу 1 источника напряжения. В соответствии с выбранным лесом матрица сечений имеет вид:
Так как при формировании уравнений сечений полюсные графы компонентов должны быть представлены как у-дуги, то полюсные уравнения двигателя необходимо разрешить относительно поперечных переменных тока i2 и момента μ2, а в качестве продольных переменных принять напряжение и2 и угол поворота φ3. Пренебрегая индуктивностью цепи якоря (L = 0), получаем (р-оператор дифференцирования):

где R — сопротивление цепи якоря; В3 и J3 — соответственно сопротивление трения в двигателе и момент инерции якоря.
Полюсные уравнения валов (пренебрегая моментами инерции) и маховиков имеют вид:
![]()
где Ki — упругости валов; В i и Jj — соответственно сопротивления трения и моменты инерции маховиков.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
