
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Ниже рассматриваются полюсные графы и уравнения наиболее часто встречающиеся многополюсных компонент.
2.3. Электронный триод
Идеальный электровакуумный триод (рис. 2.2, а) в квазилинейном режиме без сеточных токов при выборе катода в качестве базисного полюса представляется полюсным графом с двумя дугами (рис. 2.2, б), уравнения которых:
![]()
где параметры S и Gi называют соответственно крутизной и внутренней проводимостью.
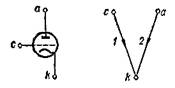
Рuc. 2.2. Электронный триод (а) и его полюсный граф (б)
Дуга 1 полюсного графа отображает двухполюсник с бесконечно большим сопротивлением (разомкнутая дуга) и ее роль сводится к фиксированию напряжения и2 между сеткой и катодом триода. Уравнение дуги 2 можно представить в виде:
![]()
где
 статический коэффициент усиления;
статический коэффициент усиления;
 внутреннее сопротивление.
внутреннее сопротивление.
Как видно, Y-матрица идеального электровакуумного триода является особенной (ее первая строка состоит из нулевых элементов)
![]()
поэтому Zд - матрица для этого многополюсника не существует.
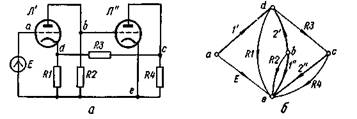
Граф схемы с электронными триодами (рис. 2.3, а) показан
на рис. 2.3, б, где первый триод представлен дугами 1' и 2', а второй— дугами 1" и 2", которые выделены жирными линиями.
 j
j
Рис 2.3. Схема с электронными триодами (а) и ее граф (б).
Дуги полюсных графов и источника напряжения имеют строго определенную ориентацию, а дуги пассивных двухполюсников ориентированы произвольно.
2.4. Транзистор
Уравнения низкочастотного транзистора (рис. 2.4, а) в квазилинейном режиме обычно представляются в трех формах:
![]()
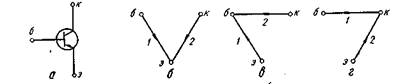
Рис. 2.4. Транзистор (а) и его полюсные графы при выборе в качестве общего полюса эммитера (б), базы (в) и коллектора (г).
Им соответствуют три системы параметров, которыми служат матрицы g, r, h этих уравнений. Переход от одной системы параметров к другой осуществляется на основе следующих зависимостей:

где через  обозначены определители соответствующих матриц, т. е.
обозначены определители соответствующих матриц, т. е. ![]() и т. п.
и т. п.
В зависимости от того, какой из трех полюсов транзистора выбран базисным (общим), имеем три типа полюсных графов: с общим эмиттером (рис. 2.4, б), с общей базой (рис. 2.4, в) и с общим коллектором (рис. 2.4, г). Для описания дуг каждого из этих полюсных графов пригодна любая из трех форм уравнений. Разумеется, численные значения параметров для различных полюсных графов отличаются между собой, поэтому параметры отличают индексами (э, б, к) соответственно схеме, в которой они определены.
Вид графа транзисторной схемы зависит от выбора базисных полюсов транзисторов. Так, для схемы (рис. 2.5, а) при общей базе для первого транзистора и общем эмиттере для второго транзистора получаем граф, изображенный на рис. 2.5, б (дуги полюсных графов транзисторов выделены жирными линиями).
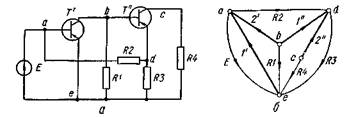
Рис. 2.5.Транзисторная схема (а) и ее граф (б).
2.5. Трансформатор
Простейший трансформатор представляет собой две индуктивно связанные катушки (рис.2.6, а), полюсные уравнения которых в линейном приближении имеют вид:
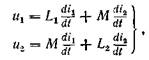
где L1 и L2 — индуктивности катушек; M — взаимная индуктивность. Величина М входит в эти уравнения со знаком плюс, если токи в катушках одинаково направлены относительно одноименных полюсов, и со знаком минус, если токи относительно одноименных полюсов направлены противоположно (одноименные полюсы обычно отмечаются жирными точками).
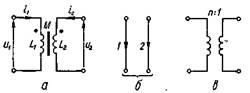
Pис. 2.6. Трансформатор (а), его полюсный граф (б) и идеальный трансформатор (в).
Представив каждую катушку ее полюсным графом (дугой), получим полюсный граф трансформатора, который состоит из двух топологически несвязанных дуг (рис. 2.6, б). Полюсные уравнения трансформатора можно представить в операторной форме следующими способами:
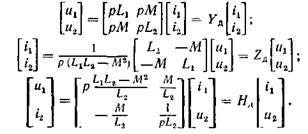
Квадратные матрицы YД, ZД и НД в этих уравнениях являются обобщенными параметрами трансформатора. Для характеристики трансформаторов используются также две величины — коэффициент связи k и коэффициента трансформации п, выражаемые соотношениями:
![]()
Из физических соображений следует, что k2<1. В предельном (теоретическом) случае при k= 1 говорят о полной связи, причем уравнения трансформатора преобразуются к виду
![]()
и представляют собой модель совершенного трансформатора. Как видно, в таком трансформаторе отношение напряжений равно коэффициенту трансформации, т. е.
и1=пи2, и1 /и2 =п.
Аналогичное соотношение для токов имеет место при условии
1/pL2→0 , т. е. L2→∞. Для того, чтобы величина п оставалась
конечной, необходимо принять также L1→∞. Тогда i2 =-ni1
и уравнения имеют вид:
![]()
Компонент, описываемый этими уравнениями, называют идеальным трансформаторам. Его можно понимать как трансформатор с полной связью и бесконечно большими индуктивностями, отношение которых конечно и равно п2. Условное обозначение идеального трансформатора показано на рис. 2.6, в. Его полюсный граф имеет тот же вид, что и в общем случае (рис. 2.6,б), но уравнения могут быть представлены только в смешанной форме. Поэтому в полюсном графе идеального трансформатора дуга 1 является z-дугой, а дуга 2 —
у-дугой.
В общем случае произвольного числа m индуктивно связанных двухполюсников их уравнения записываются в виде:
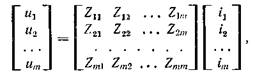
где Zij=pLij, причем L ij — собственные индуктивности и
Lij (i≠ j) — взаимные индуктивности двухполюсников.
Полюсный граф схемы с двухполюсниками при наличии индуктивных связей между ними строится так же, как и для обычных схем без индуктивных связей, т. е. каждый двухполюсник представляется дугой, и соединения дуг в графе соответствуют соединениям двухполюсников в схеме. Единственное различие состоит в том, что граф схемы с индуктивными связями может быть несвязным.
2.6. Механические многополюсники
Изложенный метод представления многополюсных компонент применим к системам любой физической природы. Ниже приводятся полюсные уравнения и полюсные графы простейших механических многополюсников.
Рычаг (рис. 2.7, а) при малых перемещениях представляется полюсным графом (рис. 2.7, б) и описывается уравнениями
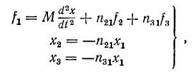
где f1, f 2, f 3 — силы; х1, х2, х3 — перемещения в точках а, b, с рычага; М — масса, приведенная в точке а; п21, п31 — отношения плеч рычага:
п21=l2/l1 , п31=l3/l1
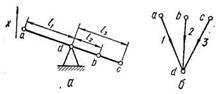
Рис. 2.7. Рычаг (а) и его полюсный граф (б).
Зубчатая передача (рис. 2.8, а) представляется полюсным графом (рис. 2.8, б) и описывается следующими полюсными уравнениями:

где μ1, μ2 — моменты и φ1, φ2 — углы поворота первого и второго валов; В1 ,В2 — крутильные сопротивления и τ1, τ2 — моменты инерции валов; п12 — передаточное число, равное отношению количества зубьев шестерен:
![]()
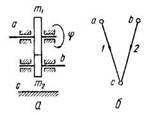
Рис. 2.8. Зубчатая передача (а) и ее полюсный
граф (б).
Натяжной ролик (рис. 2.9, а) преобразует вращательное движение в поступательное, и его полюсный граф состоит из двух отдельных дуг (рис.2.9,б).
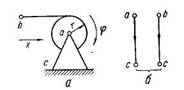
Рис. 2.9. Натяжной ролик (а) и его полюсный граф (б).
Полюсные уравнения натяжного ролика записываются в виде:
где В — крутильное сопротивление; τ — момент инерции и r — радиус ролика.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
