
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Подставив сюда выражения векторов иХN и iХТ из топологических уравнений, получим уравнение для безреактивных компонентов:

или в краткой записи

Матрицы W0, Q1 и Q2 определяются полученными выше выражениями и могут быть найдены преобразованием компонентной матрицы V для х-дуг с помощью субматриц матрицы сечений. Вектор алгебраических переменных x0, вектор переменных состояния х и задающий вектор v выражаются следующим образом:

Уравнения переменных состояния можно сформулировать на основе соотношений, следующих из топологических уравнений:

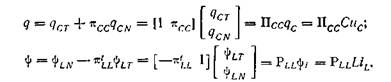
Объединяя эти соотношения в одно матричное уравнение и вводя векторы q и ψ, выражающиеся через заряды для емкостей и потокосцепления индуктивностей

находим:

или

Решив уравнение
![]()
относительно вектора х0 и подставив его значение
![]()
в дифференциальное уравнение, получим:
![]()
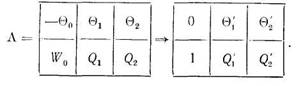
Вектор х0 можно исключить с помощью алгоритма Гаусса— Жордана над блочной матрицей Λ (по столбцам матрицы W0):
Вектор х= (q, ψ)' выражается через заряд q и потокосцепление ψ, которые, в свою очередь, являются функциями напряжений на емкостях и токах в индуктивностях:

Алгоритм формирования уравнений переменных состояния имеет свои особенности для линейных и нелинейных систем, которые рассматриваются ниже.
4.7. Линейные системы
Для линейных систем qC=CuC и ψ L = LiL, где С и L — квадратные матрицы, элементами которых являются емкости и индуктивности реактивных двухполюсников. Матрицы С и L (при отсутствии индуктивных связей) диагональны, а если имеются индуктивно связанные двухполюсники, то L не диагональна, но симметрична. Переменные q и ψ можно выразить следующим образом:
Из топологических уравнений следуют соотношения
![]()

на основании которых выразим векторы иС и iL:
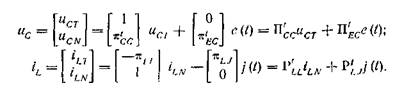
Подставляя эти выражения в формулы для q и ψ , получаем:
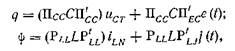
на основании чего можно записать

Приравняв производную этого выражения полученному ранее соотношению, находим:
![]()
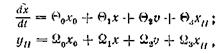
откуда получаем уравнения переменных состояния линейной системы в виде
![]()
где
![]()
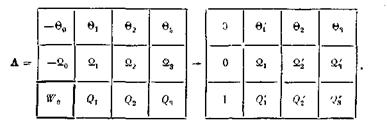
Вместо обращения матрицы Wх можно применить алгоритм Гаусса—Жордана по ее столбцам над блочной матрицей Λх:
![]()
Общая процедура формирования уравнений переменных состояния линейных систем иллюстрируется на рис. 4.4.
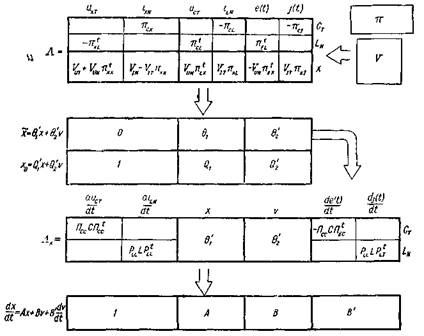
Рис. 4.4. Процедура формирования уравнений переменных состояния линейных систем.
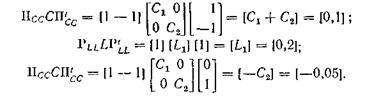
Появление производной вектора v в уравнении переменных состояния обусловлено особыми контурами и сечениями с задающими источниками. Если такие источники в особых контурах отсутствуют, то πEC=0 и πLJ=0, следовательно, Θ3=0
При отсутствии особых контуров вообще все дифференциальные переменные независимы и входят в векторы иСТ и iLN, а матрицы πCC и πLL исчезают. Тогда ПCC =1 и РLL=1, вследствие чего матрица Wx имеет квазидиагональную структуру:
![]()
а при отсутствии индуктивных связей Wx—диагональная матриц, элементами которой являются параметры реактивных двухполюсников. В таких случаях умножение на обратную матрицу W-1x соответствует делению каждого уравнения переменных состояния на соответствующий диагональный элемент матрицы Wx
Рассмотрим в качестве примера электрическую схему рис. 4.5, a.
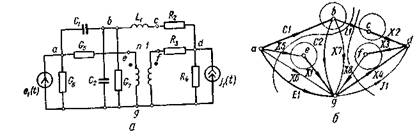
Рис. 4.5. Электрическая схема с идеальным трансформатором (а) и ее граф (б).
В соответствии с выбранным фундаментальным деревом графа (рис. 4.5, б) запишем матрицу сечений для хорд:
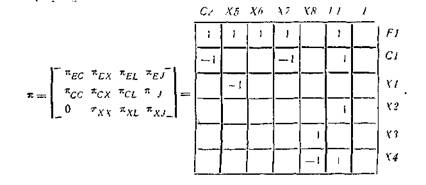
Компонентная матрица для х-дуг в неявной форме имеет вид:
Преобразовав этy матрицу в соответствии с субматрицами матрицы сечений, запишем блочную матрицу Λ:
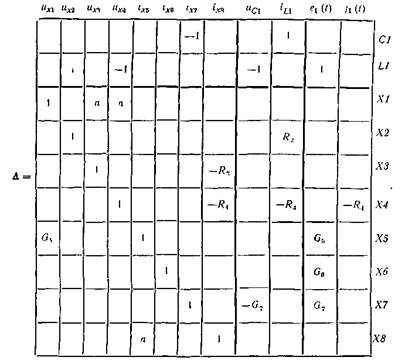
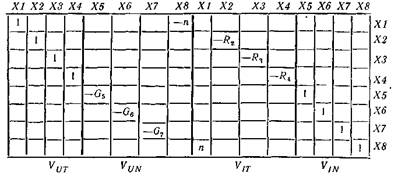
Пусть параметры компонентов схемы имеют следующие нормативные значения: R2 = R3 =R4=1; G5 = G6 = G7 =0, 5; n = 2; C1=C2=0,05;
L1 = 0,2. Подставив эти значения в матрицу Λ и применив процедуру исключения по столбцам субматрицы W, получим:

Отсюда имеем уравнения для векторов ![]() и х0:
и х0:
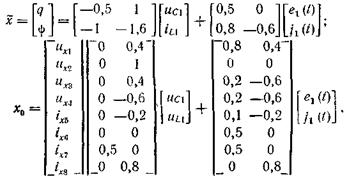
В соответствии с заданными значениями емкостей и индуктивностей сформируем матрицы:
Полученные матрицы имеют первый порядок, так как схема характеризуется только двумя переменными состояния — напряжением на емкости иС1 и током в индуктивности iL1. Матрица
 отсутствует, поскольку нет особых сечений с источниками тока. Матрица Λх имеет вид:
отсутствует, поскольку нет особых сечений с источниками тока. Матрица Λх имеет вид:
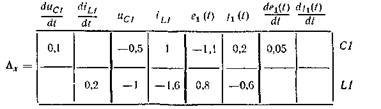
Разделив первую строку на 0,1, а вторую на 0,2, получим слева единичную матрицу, и, следовательно, уравнения переменных состояния имеют вид:
![]()
4.8. Нелинейные системы
Изложенный алгоритм формирования уравнений переменных состояния легко обобщается на нелинейные системы. При формировании фундаментального дерева из дуг безреактивных компонентов выделяются дуги нелинейных двухполюсников, причем управляемые током дуги помещаются в дерево (после е-дуг и С-дуг), а управляемые напряжением — в дополнение (перед L-дугами и
j-дугами). Тогда матрица сечений запишется в виде:
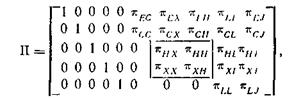
где индекс H относится к нелинейным безреактивным дугам, а в рамку заключена субматрица матрицы сечений для безреактивных дуг.
Из топологических уравнений, определяемых этой матрицей, следует соотношений:
или в краткой записи
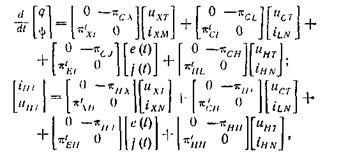
где векторы х0, x и v определены, как и ранее; хН и уН — векторы переменных, связанных с нелинейными безреактивными компонентами:
![]()
Вектор х0 можно исключить из этих выражений на основе уравнения для переменных безреактивных линейных компонентов
![]()
которое отличается от линейного (4.6) только наличием в правой части слагаемого Q3хН,где:
![]()
Для исключения вектора х0 удобно, как и ранее, применить алгоритм Гаусса—Жордана (но теперь блочная матрица Λ имеет более общин вид):
Таким образом, приходим к уравнениям:
Если нелинейными являются только безреактивные компоненты, то первое уравнение таким же способом, как и линейное, может быть приведено к нормальной форме, но теперь оно содержит член с вектором хН переменных нелинейных компонентов. Уравнение переменных состояния совместно с нелинейным алгебраическим уравнением образует систему

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
