
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рассмотрим суграф, содержащий только e- и y-дуги (а также все р вершин) исходного графа. Пусть он состоит из ks компонентов (изолированные вершины также считаются компонентами суграфа), а число всех е- и у-дуг равное qs. Поскольку фундаментальное дерево формируется с преимуществом е - и у-дуг, то все сечения этого суграфа несокращаемые, а все контуры сокращаемые. Очевидно, количество таких сокращаемых контуров равно цикломатическому числу суграфа, т. е. σ' = qs — р + ks. Количество несокращаемых сечений равно рангу суграфа р — ks, а сокращается v' = v — (р — ks) сечений. Следовательно, общее число сокращаемых координат
![]()
Из соотношения для ранга исходного графа v — р — k, где k — число его компонентов, следует р = v + k, на основе чего полученную формулу для числа сокращаемых координат можно представить в виде:
![]()
где ∆k — превышение по числу компонентов е- и у-суграфа над исходным графом.
Ранг v является характеристикой графа, которая не зависит от типа дуг. Поэтому число сокращаемых координат данного графа определяется только значениями величин qs и ∆k, т. е. разбиением взаимоопределенных дуг. Каждая новая у-дуга увеличивает μ на единицу, а объединение двух частей суграфа (т. е. уменьшение ∆k на единицу) уменьшает μ на два. Отсюда ясно, что к у-дугам следует относить, прежде всего, те взаимоопределенные дуги, которые не связывают отдельных частей данного графа. Дуги, связывающие какие-либо две части суграфа, целесообразно относить к у-дугам, если их не меньше двух.
Практически оптимальное разбиение удобно осуществлять на w- графе взаимоопределенных дуг, который получается из исходного графа сокращением (стягиванием) е - и y-дуг и удалением z-, j-дуг (разумеется, короткозамкнутые s-дуги также сокращаются, а разомкнутые q-дуги удаляются). К у-дугам следует отнести петли и параллельные дуги w-графа. Каждая новая у-дуга сокращается, и процесс заканчивается тогда, когда в w - графе не останется петель и параллельных дут. Оставшиеся дуги w-графа после этого относятся к z-дутам.
Например, для графа на рис. 5.1, а (у-дуги изображены сплошными тонкими линиями, z-дуги — штриховыми, а w-дуги— жирными линиями) получаем граф взаимоопределенных дуг, приведенный на рис. 5.1, б.
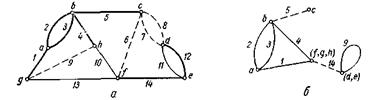
Рис. 5.1. Оптимальное разбиение взаимоопределенных дуг:
а — исходный граф; б — граф взаимоопределенных дуг с разбиением на у-дуги (1, 2, 3, 4, 9) и z - дуги (5, 14).
К у-дугам относим, прежде всего, петлю 9 и параллельные дуги 2 и 3. После их закорачивания снова появляются параллельные дуги 1 и 4, которые также относим к у-дугам. Дуги 5 и 14 идентифицируются как z-дуги. При полученном разбиении μ=8+2∙2-7=5.
5.5. Определение матрично-векторных параметров
Итак, при моделировании в сокращенном координатном базисе целесообразно предварительно провести оптимальное разбиение взаимоопределенных дуг. К таким дугам относятся обычно дуги двухполюсных компонентов. Однако если требуется получить уравнения в дифференциальной форме, то дуги реактивных двухполюсников идентифицируются как у-дуги или z-дуги в соответствии с их полюсными уравнениями, которые выражают соответственно поперечные или продольные переменные через производные.
Матрично-векторпые параметры системы W и Q можно определить путем операций над гомологическими и компонентными субматрицами в соответствии с выражениями, полученными в (5.3). В качестве примера рассмотрим гидромеханическую систему (рис. 4.2, а), граф которой с нормальным деревом изображен на рис. 5.2, а.
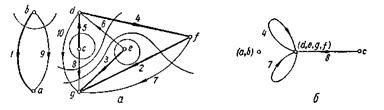
Рис. 5.2. Граф гидромеханической системы (а) и граф взаимоопредсленных дуг (б).
Как видно из графа взаимоопределенных дуг (рис. 5.2, б), получающегося из графа системы закорачиванием е-дуг (1, 2, 3) и у-дуг (6, 9, 10), а также удалением z-дуги (5), по условию оптимального разбиения дуги 4, 7 идентифицируются как у-дуги, a 8 — как z-дуга. При этом qs = 8, ∆ks = 1, v = 5, следовательно, число сокращаемых координат
μ= 8 + 2 • 1 - 5 = 5. Топологические матрицы имеют вид:
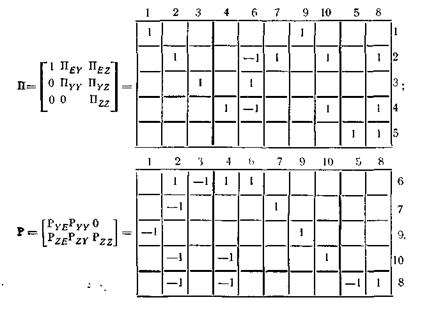
Компонентная матрица V0 запишется следующим образом (матрица VD отсутствует, так как граф не содержит короткозамкнутых и разомкнутых управляющих дуг):
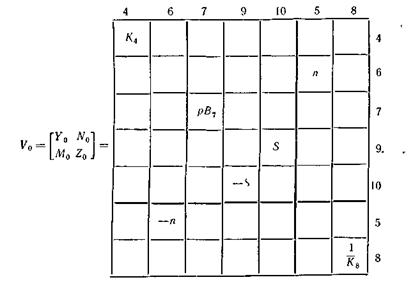
Тройные произведения матриц, входящие в блоки матрично-векторных параметров W и Q, можно получить путем операций над строками и столбцами соответствующих блоков компонентной матрицы V0 подобно тому, как это делалось при формировании математической модели в однородных системах координат (5.5). Так как
![]()
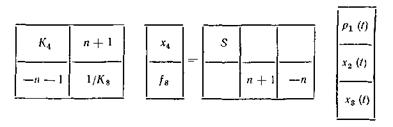
то записав матрицу W и вектор Q, приходим к уравнениям в сокращенном координатном базисе:
5.6. Операции над столбцами
Обычно компонентные матрицы V0 и VD сильно разреженные, а их размеры определяются числом qx для полюсных графов компонентов и числом qD управляющих короткозамкнутых и разомкнутых дуг (матрица V0 квадратная qx-го порядка, VD имеет размер qx×qD). Работать с такими матрицами неудобно, особенно, если система содержит большое число компонентов.
Заслуживает внимания другой способ определения матрично-векторных параметров системы в сокращенном координатном базисе. Он основан на непосредственном введении параметров каждой дуги в топологические уравнения:
![]()
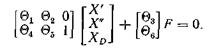
которые удобно представить в объединенной форме:
Компонентные уравнения линейных систем выражают каждую составляющую х'k вектора X' через составляющие хr векторов X" и ХD в виде суммы
![]()
где wkr — параметр, который характеризует зависимость х'k от хr (для реактивных компонентов wkr содержит операторы дифференцирования или интегрирования). Для исключения переменной х'k из топологического уравнения достаточно соответствующий этой переменной столбец матрицы
![]()
умножить на параметр wkr и сложить со столбцом, соответствующим переменной хr (для всех значений r, при которых wkr отлично от нуля). После этого столбец, соответствующий переменной хk, удаляется из матрицы Θ, а переменная хk исключается из вектора X'. Таким способом можно ввести параметры всex компонентов, в результате чего вектор X' исключается из исходных топологических уравнений, и они преобразуются к виду:
![]()
После этого остается подставить
![]()
и в результате получаем
![]()
что соответствует уравнению системы WХ=QF в сокращенном координатном базисе, где
![]()
И на этом этапе алгебраические операции над матрицами можно заменить операциями над столбцами матрицы [ΛX,ΛD,ΛF].
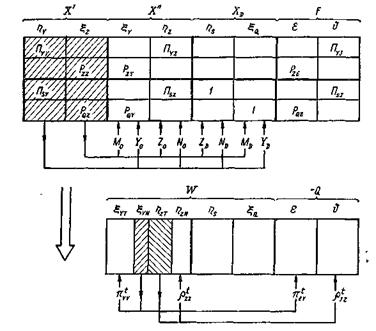
Рис. 5.3. Определение матрично-векторных параметров линейной системы в сокращенном координатном базисе,
Для этого достаточно столбцы матрицы ΛX преобразовать согласно уравнению
![]()
которому соответствуют соотношения:
![]()
или
![]()
В результате в матрице ΛX останутся только столбцы для вектора
Хо = (ξYT, ηZN), которые совместно с матрицей ΛD образуют матрицу W, а матрица ΛF преобразуется в матрицу — Q. Изложенный способ определения матрично-векторных параметров иллюстрируется на рис. 5.3, а его применение к рассмотренной в (5.5) гидромеханической системе — на рис. 5.4.
Pиc. 5.4. Определение матрично-векторных параметров гидромеханической системы.
5.7. Уравнения переменных состояния
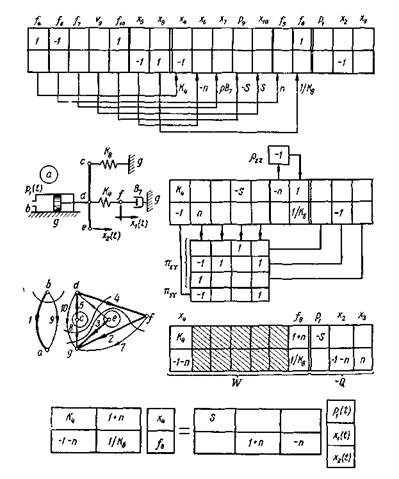
Разобьем множество у-дуг на реактивные (емкостные) С-дуги и безреактивные G-дуги, а множество z-дуг — на реактивные (индуктивные) L-дуги и безреактивные R-дуги. Нормальное дерево строится в соответствии с иерархией дуг (Е, S, С, G, R, L, Q, J), и матрица сечений имеет вид:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
