
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Приведение расчетной схемы на первом этапе заключается в выравнивании силовых и скоростных характеристик элементов схемы и сведении разнородных движений элементов к одному виду.
Второй задачей приведения является уменьшении числа степеней свободы схемы, т. е. преобразование п-мерной схемы в 1 - мерную, где 1< п.
Основанием для приведения параметров расчетных схем и уменьшения их размерности являются соответственно допущения о равенстве потенциальных и кинетических энергий и работ внешних сил на участках приведения и о совпадении частот и форм свободных колебаний исходной и приведенной системы в заданном частотном диапазоне
На рис. 2, а изображена кинематическая схема приводного механизма, которая одновременно может рассматриваться и как расчетная схема данной системы. На рис. 2, б показана приведенная расчетная схема, полученная путем упрощения указанной кинематической схемы.
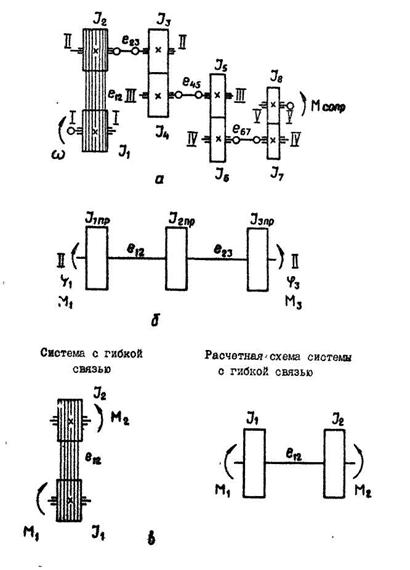
Рис. 2
На рис. 3 представлена блок-схема алгоритма расчета значений приведенных параметров расчетных схем многомассовых систем на первом этапе приведения.
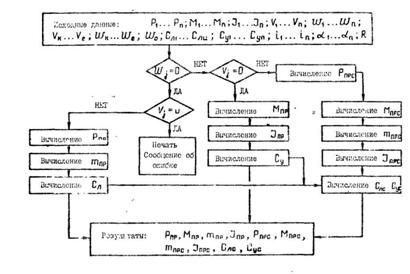
Рис. 3
Вычисления приведенных параметров схемы производятся по следующим зависимостям:
 (1)
(1)
![]() (2)
(2)
![]() (3)
(3) ![]() (4)
(4) ![]() (5)
(5) ![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
 (9)
(9)
 (10)
(10)
![]() (11)
(11)
![]() (12)
(12)
где
![]() - соответственно приведенная масса и масса
- соответственно приведенная масса и масса ![]() - го звена однородной системы (с одним видом движения звеньев);
- го звена однородной системы (с одним видом движения звеньев);
![]() - линейные скорости соответственно
- линейные скорости соответственно ![]() -го звена и звена приведения;
-го звена и звена приведения;
![]() - приведенный момент инерции и момент инерции
- приведенный момент инерции и момент инерции ![]() -го звена однородной системы;
-го звена однородной системы;
![]() - угловые скорости соответ ственно
- угловые скорости соответ ственно ![]() -го звена и звена приведения;
-го звена и звена приведения;
![]() - соответственно приведенная масса, момент инерции и угловая скорость
- соответственно приведенная масса, момент инерции и угловая скорость ![]() -го звена смешанной системы;
-го звена смешанной системы;
![]() - приведенный момент инерции и масса и линейная скорость
- приведенный момент инерции и масса и линейная скорость ![]() -го звена смешанной системы;
-го звена смешанной системы;
![]() - соответственно приведенная сила и сила на
- соответственно приведенная сила и сила на ![]() -м звене однородной системы;
-м звене однородной системы;
![]() - угол между направлениями скорости и силы на
- угол между направлениями скорости и силы на ![]() -м звене;
-м звене;
![]() - приведенный момент и момент на
- приведенный момент и момент на ![]() - м звене однородной системы;
- м звене однородной системы;
![]() - соответственно приведенная сила и момент на
- соответственно приведенная сила и момент на ![]() -м звене смешанной системы;
-м звене смешанной системы;
![]() - приведенный момент и сила на
- приведенный момент и сила на ![]() -м звене смешанной системы;
-м звене смешанной системы;
![]() - угол между направлениями слорости и силы на
- угол между направлениями слорости и силы на ![]() -м звене;
-м звене;
![]() - приведенная линейная жесткость и линейные жесткости звеньев однородной системы;
- приведенная линейная жесткость и линейные жесткости звеньев однородной системы;
![]() - передаточные отношения между звеньями системы и звеном приведения;
- передаточные отношения между звеньями системы и звеном приведения;
![]() - приведенная угловая жесткость и угловые жесткости звеньев однородной системы;
- приведенная угловая жесткость и угловые жесткости звеньев однородной системы;
![]() - приведенная линейная жесткость смешанной системы;
- приведенная линейная жесткость смешанной системы;
![]() - приведенная угловая жесткость смешанной системы;
- приведенная угловая жесткость смешанной системы;
![]() - радиус приведения;
- радиус приведения;
![]()
Составление расчетных схем методом замещения заключается в замене схемы проектируемого устройства на основе принципа аналогий эквивалентной по своим динамическим свойствам системой, которая более удобна для решения поставленной задачи, например, для анализа колебательных процессов в системе. Схематизация систем подобным образом не поддается формализации и в каждом конкретном случае производится на основе эвристических предпосылок: опыта, интуиции и т. п. На рис.2, в показана система с гибкой связью и ее расчетная схема, полученная методом замещения.
4. МЕТОДЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ
РАСЧЕТНЫХ СХЕМ
Математическое описание расчетных схем объектов проектирования осуществляется с использованием двух групп математических методов:
методов описания на основе соответствующих принципов и законов теоретической механики и теории механизмов и маиин;
граф-аналитичоских методов, основанных на принципе топологической интерпретации физических свойств и структуры систем.
Выбор конкретного метода математического описания зависит от вида расчетной схемы, исходных условий задачи, а также требований, предъявляемых к процессу описания и математической модели системы.
Такими требованиями являются:
простота и формализм процесса описания;
инвариантность процесса описания относительно числа степеней свободы изучаемой системы;
инвариантность процесса описания относительно нелинейности и физической природы компонент системы;
возможность учета параметров и структуры системы в явном виде;
удобство и простота последующего поиска аналитиеских или численных решений.
Методы первой группы целесообразно применять при описании относительно простых расчетных схем, полученных методом приведения или замещения. Граф—аналитические методы наиболее эффективны при описании сложных расчетных схем, эквивалентных по своей структуре и составу кинематическим схемам объектов проектирования.
Рассмотрим методы описания на основе законов механики,
Описание расчетных схем на основе законов механики осуществляется следующими методами:
- на основе принципа Даламбера;
- да основе уравнений Лагранжа второго рода;
- путем составления уравнений движения в виде уравнений моментов или сил либо в виде уравнения кинетических энергий.
Уравнения Даламбера записываются в виде
![]() (13)
(13)
где ![]() - соответственно равнодействующие сил
- соответственно равнодействующие сил
движущих и сил сопротивления, действующих на ![]() -ю массу;
-ю массу;
![]() - сила инерции, приложенная к
- сила инерции, приложенная к ![]() -й массе;
-й массе;
![]() =1, 2,…,
=1, 2,…,
Уравнения Лагража второго рода составляются в виде системы из п дифференциальных уравнений второго порядка с п неизвестными функциями времени
![]() (14)
(14)
где Т, П - соответственно кинетическая и потенциальная энергия сосредоточенных масс системы;
![]() - соответственно обобщенная координата и обобщенная скорость
- соответственно обобщенная координата и обобщенная скорость ![]() -й массы;
-й массы;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
