
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
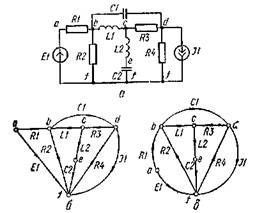
Рис. 1.5. Электрическая схема (а) и ее изоморфные графы (б и в).
Направления дуг пассивных двухполюсников можно выбирать произвольно. Дуги активных двухполюсников ориентируются по направлению источника тока и противоположно направлению источника напряжения (это связано с тем, что направление дуги указывает на положительное направление тока и противоположно положительному направлению напряжения).
Удобный практический прием построения графа для данной схемы состоит в следующем. На схеме выделяется внешний контур и изображается замкнутой линией (например, окружностью), на которой размещаются соответствующие вершины. Затем граф дополняется теми ребрами и вершинами, которые отсутствуют во внешнем контуре. Так, на рис. 1.5, в показан изоморфный граф, построенный по этому способу.
Уравнения связей выражаются законами Кирхгофа, представляющими условие непрерывности для токов и условие равновесия для напряжений в любой момент времени t:
1) алгебраическая сумма токов для любой вершины равна нулю (первый закон Кирхгофа), т. е.
∑i(t) = 0;
2) алгебраическая сумма напряжений в любом контуре равна нулю (второй закон Кирхгофа), т. е.
∑u(t) = 0.
1.4. Механические поступательные системы
Идеальные пассивные двухполюсники механических систем - это механическое сопротивление, масса и упругость. Перемещение х(t) и скорость v(t) являются продольными переменными, а сила f(t) — поперечной переменной.
Сопротивление (рис. 1.6, а) представляет собой компонент, который отражает превращение механической энергии в тепло. В простейшем случае предполагается, что это превращение происходит в результате вязкого трения, сила которого fB(t) пропорциональна относительной скорости vB(i) трущихся тел, т. е.
![]()
Здесь В — параметр, называемый механическим поступательным сопротивлением, a 1/B — инверсное сопротивление или податливость. Полюсы элемента сопротивления соответствуют твердым телам, между которыми имеет место вязкое трение.
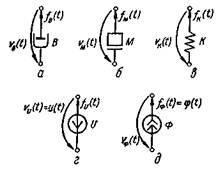
Pис. 1.6. Идеальные механические (поступательные) двухполюсники:
а — сопротивление; б - масса; в - упругость; г – источник скорости,
д – источник силы.
Масса (рис. 1.6, б) — компонент, накапливающий кинетическую энергию и, следовательно, обладающий механической инерцией. Зависимость между силой инерции fМ(t) и перемещением xM(t) или скорости vМ(t) массы М относительно выбранной точки отсчета выражается соотношениями:

где 1/М называется инверсной массой. Один из полюсов компонента массы связан с движущимся телом, а другой — с неподвижной или равномерно движущейся системой координат (точкой отсчета перемещения и скорости).
Упругость (рис. 1.6, в) – компонент накапливающий потенциальную энергию. Этот двухполюсник можно представить как пружину, концы которой соответствуют его полюсам. В линейном случае предполагается, что такая пружина не обладает массой и сила fк(t) реакции пропорциональна относительному перемещению xк(t) ее концов, т. е.
![]()
где К - параметр, называемый жесткостью; 1/К —гибкостью.
Идеальные источники механической энергии могут быть двух типов. Задающая скорость u(t) какой-либо точки системы представляется
источником скорости (рис. 1.6, г), один полюс которого связан с этой точкой, а другой — с той точкой системы, относительно которой эта скорость задается. Скорость такого двухполюсника не зависит от приложенных сил, т. е. vu(t)=u(t). Истопник силы изображается двухполюсником (рис. 1.6, д), полюсы которого соответствуют точкам приложения силы и ее реакции, причем сила в этом двухполюснике определяется некоторой функцией времени φ(t) и не зависит от скорости, т. е.
fФ(t) =φ(t)
На основании приведенных определений можно построить схему механической поступательной системы. При этом узлы схемы соответствуют соединениям компонент системы, которые могут рассматриваться как единое целое, а соединяющие линии – жестким связям между компонентами. Переход от механической схемы к ее графу, как и для электрической схемы, на основе соответствия между инцидентностью идеальных двухполюсников узлам схемы и инцидентностью дуг и вершин графа. Направления дуг для пассивных двухполюсников принимаются в соответствии с выбранной системой отсчета (противоположно направлению перемещений х), а ориентация дуг источников определяется заданными направлениями (для источников силы они совпадают, а для источников скорости — противоположны).
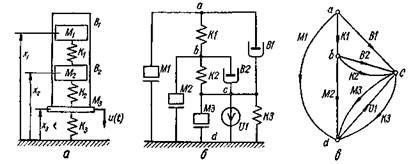
Рис.1.7. Механическая поступательная система (а), ее схема (б)
и ее граф (в).
Пусть, например, в системе (рис. 1.7, а), движение которой может совершаться только по вертикали, платформа массой М3 движется с заданной скоростью и(t). Схема этой системы показана на рис. 1.7, б, а ее граф — на рис. 1.7, в. При достаточном навыке граф можно построить и непосредственно из рассмотрения условного изображения механической поступательной системы без промежуточного вычерчивания ее схемы.
Уравнения связей механической поступательной системы выражают условие равновесия сил и условие непрерывности для скоростей (или перемещений):
1) алгебраическая сумма сил для любой вершины равна нулю (принцип Даламбера):
∑ f (t)= 0;
2) алгебраическая сумма скоростей (перемещений) в любом контуре равна нулю:
∑ v(t)= 0.
1.5. Механические вращательные системы
Соотношения для механических вращательных систем аналогичны соотношениям для поступательных систем. Перемещению x(t) соответствует угол поворота φ(t), линейной скорости v(t) — угловая скорость ω(t), силе f (t)- вращающий момент μ (t) . Cooтветственно для механических вращательных систем имеем три пассивные компоненты и два идеальных источника, для обозначения которых можно использовать те же символы, что и для поступательных систем.
Вращательное сопротивление (рис. 1.8, а) характеризует рассеивание механической энергии в тепло за счет вязкого трения:
![]()
где В — крутильное сопротивление; 1/В — инверсное сопротивление.
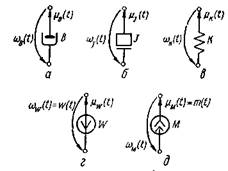
Рис. 1.8. Идеальные механические (вращательные) двухполюсники:
а—вращательное сопротивление; б — вращающаяся масса;
в — вращательная упругость; г — источник угловой скорости;
д — источник момента.
Вращающаяся масса (рис. 1.8, б) — компонент, характеризующий кинетическую энергию вращательного движения:
![]()
где J — момент инерции.
Вращательная упругость (рис. 1.8, в) — компонент, накапливающий потенциальную энергию вращательного движения:
![]()
где К — крутильная жесткость; 1/К — гибкость.
Идеальный источник может быть источником угловой скорости (рис, 1.8, г), характеризующимся задающей угловой скоростью ω(t) и источником момента (рис. 8.8, д), характеризующимся задающим моментом m(t).
Пример построения схемы и графа механической вращательной системы показан на рис. 1.9. Узлы графа соответствуют вращающимся массам, а направления ребер принимаются в соответствии с выбранным положительным направлением отсчета угла поворота. Параметры J1 и J2, означают моменты инерции роторов, В1 и В2 — вязкое трение в опорах, a К1 — жесткость вала.
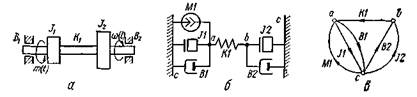
Рис. 1.9. Механическая вращательная система (а), ее схема (б) и
граф (в).
Уравнения связей механической вращательной системы выражают условие равновесия моментов и условие непрерывности угловых скоростей (или углов поворота):
1) алгебраическая сумма моментов для любой вершины равна нулю:
∑ μ (t) = 0;
2) алгебраическая сумма угловых скоростей (углов поворота) в любом контуре равна нулю:
∑ω(t)=0.
1.6. Пневматические системы
Движение газа в ограниченной среде характеризуется зависимостью между давлением p(t) и потоком g(t), который выражается как количество молекул, проходящих в единицу времени. Используются три пассивные двухполюсные компоненты, представляющие собой идеализированные свойства пневматических систем: сопротивление, инертность и упругость. При этом поток рассматривается как поперечная величина, а давление (разность давлений) — как продольная величина.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
