
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
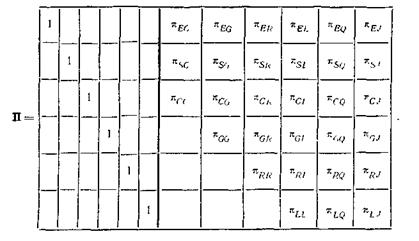
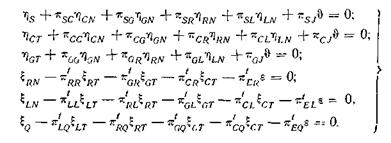
На основании этой матрицы, учитывая, что ηQ =0 и ξS = 0, а также используя зависимость ρ=—πt, можно записать две системы топологических уравнений. Одна из них служит исходной для формирования уравнений переменных состояния в сокращенном координатном базисе:
Параметры безреактивпых компонентов можно вводить, как и ранее, преобразованием столбцов матрицы, соответствующей этой системе уравнений. Параметры реактивных компонентов вводятся в соответствии с компонентными уравнениями:
![]()
где С и L — емкости и индуктивности электрических компонентов или их аналоги для компонентов другой физической природы.
Другая система топологических уравнений, соответствующая сокращаемым координатам, используется для удаления из исходной системы (после введения параметров компонентов) зависимых переменных ηRT, ηLN, ξCN и ξGN :
![]()
Зависимые дифференциальные переменные исключаются на основании продифференцированных уравнений для ηLN, и ξCN :

При этом могут появиться производные задающих функций υ(t) и ε(t) источников, для которых отводится необходимое количество столбцов (по числу ненулевых столбцов матриц πLJ и πtEC).
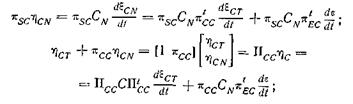
Так как зависимые переменные ηcn и ξlt не входят в уравнения для
G-сечений и R-контуров, то соответствующие члены можно исключить в соответствии с соотношениями для поперечных переменных:
и для продольных переменных:
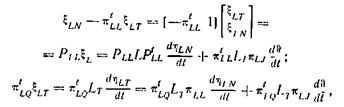
где ![]() матрицы параметров реактивных компонентов (при отсутствии индуктивных связей они диагональны), a CN и LT — их субматрицы, образованные соответственно из столбцов для С-хорд и L-ветвей дерева. Приведенные соотношения пригодны и для случаев, когда имеются индуктивные связи.
матрицы параметров реактивных компонентов (при отсутствии индуктивных связей они диагональны), a CN и LT — их субматрицы, образованные соответственно из столбцов для С-хорд и L-ветвей дерева. Приведенные соотношения пригодны и для случаев, когда имеются индуктивные связи.
Процедура формирования уравнений для линейных систем с использованием сокращенного координатного базиса иллюстрируется рис. 5.5.
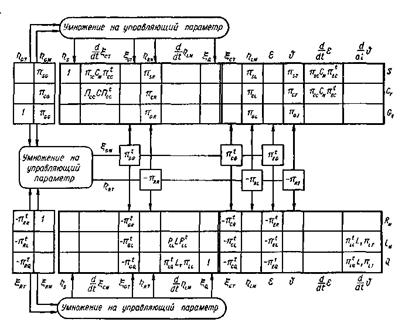
Рис. 5.5. Формирование уравнений линейной системы в сокращенном координатном базисе.
После объединения преобразованных матриц достаточно разделить алгебраические и дифференциальные переменные, применив алгоритм Гаусса—Жордана по столбцам для ηS,![]()
В результате квадратная матрица из этих столбцов преобразуется в единичную, а остальная часть преобразованной матрицы содержит необходимую информацию для записи уравнений переменных состояния и выходных уравнений.
Пусть после применения алгоритма Гаусса—Жордана получена матрица:
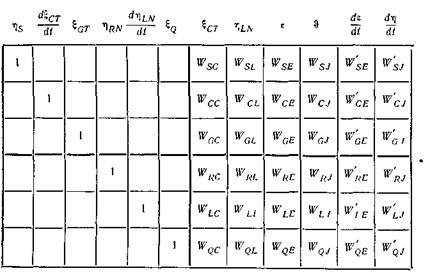
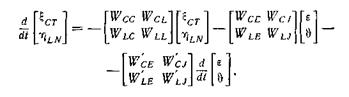
Тогда уравнения переменных состояния запишутся в виде:
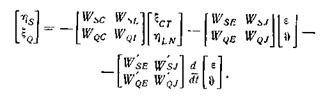
Выходное уравнение получается из тех строк, которые соответствуют искомым переменным. Если все искомые переменные зафиксированы короткозамкнутыми и разомкнутыми дугами, то оно формируется из соответствующих строк уравнения:
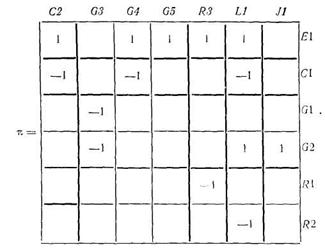
На рис. 5.6 изложенный алгоритм иллюстрируется для электрической схемы, которая рассматривалась в (4.7).
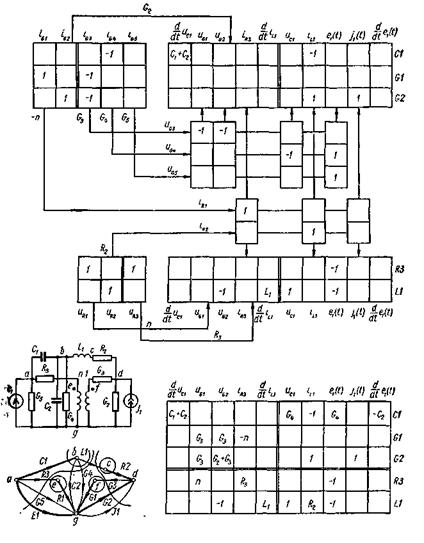
Рис. 5.6. Формирование уравнений электрической схемы.
Нормальное дерево выбрано в соответствии с оптимальным разбиением взаимоопределенных дуг. Матрица сечений для хорд имеет вид:
После преобразования полученной матрицы в сокращенном координатном базисе с помощью алгоритма Гаусса—Жордана легко записать уравнения переменных состояния и требуемые выходные уравнения.
5.8. Особенности сокращенного координатного базиса
Главная положительная особенность моделирования систем в сокращенном координатном базисе состоит в том, что топологически зависимые переменные (дифференциальные ξCN, ηlt и алгебраические ξGN, ηRT) исключаются путем алгебраического суммирования столбцов матриц без применения алгоритма Гаусса—Жордана или подобной ему процедуры. При этом ход вычислительного процесса подсказывается самой структурой системы и осуществляется наилучшим образом с учетом всех ее особенностей. Дальнейшее исключение переменных вплоть до получения уравнений переменных состояния и выходных уравнений проводится на матрице минимальных размеров, благодаря чему уменьшается опасность накоплении ошибок вычислений за счет неудачного выбора опорных элементов. Разумеется, существенно снижается и общий объем вычислительной работы. Даже в таком простом примере, как на рис. 5.6, порядок матрицы, которую требовалось преобразовать к единичной, уменьшился вдвое по сравнению с полученной в (4.7).
При реализации изложенного алгоритма в сокращенном координатном базисе на вычислительных машинах достигается предельно возможная экономия оперативной памяти. Для матрицы схемы отводится требуемый массив памяти, а столбцы для переменных ηG и ξR (рис. 5.5) могут вызываться поочередно по мере введения параметров компонентов. Размеры матрицы схемы и каждого из ее блоков известны уже после формирования дерева, и поэтому при программировании можно воспользоваться динамическим распределением делением памяти, отводя в каждом случае для этой матрицы столько ячеек, сколько требуется в соответствии с характером решаемой задачи.
Благодаря тому, что нормальное дерево формируется с преимуществом короткозамкнутых дуг перед емкостными и индуктивных дуг перед разомкнутыми, в сокращенном координатном базисе отсутствуют топологически зависимые дифференциальные переменные даже в тех случаях, когда имеются особые контуры с короткозамкнутыми дугами и особые сечения с разомкнутыми дугами.
Например, для схемы рис. 4.8, рассмотренной в (4.11), нормальное дерево показано на рис. 5.7 (по условию оптимального разбиения все резисторы представляются G-дугами).
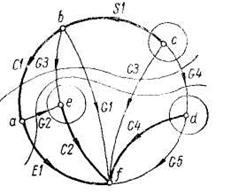
Рис. 5.7. Нормальнее дерево графа схемы с особым контуром, содержащим короткозамкнутую дугу.
Так как в дерево не вошла дуга С3, то ее напряжение иС3 заведомо будет отсутствовать в уравнениях схемы и при формировании математической модели не потребуется ее исключение (при п = 2 будет иметь место компонентная зависимость переменных, которая исключается по изложенному ранее способу).
Изложенный алгоритм (см. рис. 5.5) построен при некоторых ограничениях на характер управляющих дуг. Кроме короткозамкнутых и разомкнутых дуг, ими могут быть только безреактивные дуги полюсных графов компонентов, причем G-дуги не должны управлять по поперечной величине (току), а R-дуги — по продольной величине (напряжению). Это весьма слабое ограничение, так как в любом случае можно ввести необходимое количество управляющих короткозамкнутых и разомкнутых дуг. Кроме того, чаще всего управляющими являются взаимоопределенные дуги и их можно отнести к R-дугам, если они управляют по поперечной величине, или к G-дугам, если они управляют по продольной величине.
5.9. Обобщенная процедура
Обобщим изложенную процедуру формирования уравнений переменных состояния на нелинейные системы, сняв одновременно ограничения на характер управляющих дуг. При этом воспользуемся обозначениями и терминами электрических величин, распространяя полученные результаты на другие физические системы по аналогии.
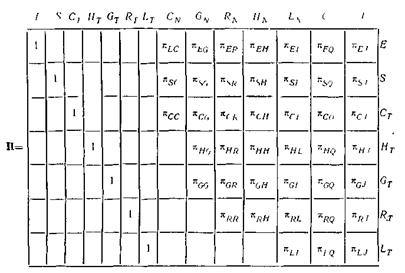
При формировании фундаментального дерева, определяющею систему координат, дуги нелинейных двухполюсников распределяются между деревом и дополнением следующим образом: дуги управляемых током двухполюсников помещаются в дерево (после С-дуг), а управляемых напряжением — в дополнение (перед L-дугами). Взаимоопределенные дуги распределяются между деревом и дополнением произвольно. При этом матрица сечений имеет вид:
Для исключения топологически зависимых алгебраических переменных наряду с соотношениями
![]()
используются соотношения:
![]()
Обобщенная процедура формирования уравнений нелинейной системы в сокращенном координатном базисе показана на рис. 5.8.
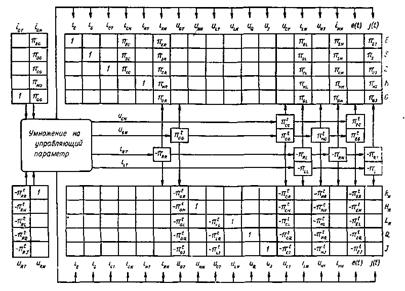
Рис.5.8. Обобщенная процедура формирования математической модели в сокращенном координатном базисе.
На этом этапе вводятся параметры только безреактивных компонентов, представленных G-дугами и R-дугами. Управляющей может быть любая дуга, в том числе и дуги источников. Единственное ограничение на характер управляющих дуг состоит в том, что G-дуги не должны управлять по току, а R-дуги — по напряжению. Это ограничение не существенно для резисторов, так как управляющие по току резисторы можно всегда представить как R-дуги, а управляющие по напряжению резисторы — как G-дуги (при этом такие резисторы исключаются из множества взаимоопределенных w-дуг и не подлежат оптимальному разбиению).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
