
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
решение которой при заданных нелинейных функциях φ( хН, уН ) =0, векторе v и начальных условиях x(t0) = х0 позволяет найти векторы х и хН , а значит и вектор х0.
При наличии нелинейных реактивных компонентов обычно используется уравнение для производной вектора ![]() . Оно решается совместно с нелинейным алгебраическим уравнением каким-либо численным методом, причем вектор
. Оно решается совместно с нелинейным алгебраическим уравнением каким-либо численным методом, причем вектор ![]() определяется на каждом шаге интегрирования на основе заданных функций qС(uС) и ψL (iL) или С(uС) и L(iL).
определяется на каждом шаге интегрирования на основе заданных функций qС(uС) и ψL (iL) или С(uС) и L(iL).
Не останавливаясь на численных методах решения нелинейных алгебраических и дифференциальных уравнений, проиллюстрируем формирование уравнений переменных состояния на примере транзисторного усилителя (рис. 4.6, а).
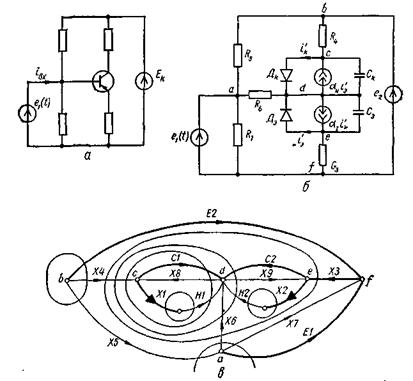
Рис. 4.6. Транзисторный усилитель (а), его схема замещения (б) и граф (в).
Замещая транзистор нелинейной схемной моделью (см. рис. 2.18,б), получаем схему рис. 4.6, б. Нелинейные безреактивные компоненты Дк и Дэ, задаются уравнениями:
![]()
а нелинейные емкости выражаются функциями
![]()
где — величины, выражающиеся через физические параметры транзистора и определяемые соответствующими вычислениями или экспериментальным путем.
— величины, выражающиеся через физические параметры транзистора и определяемые соответствующими вычислениями или экспериментальным путем.
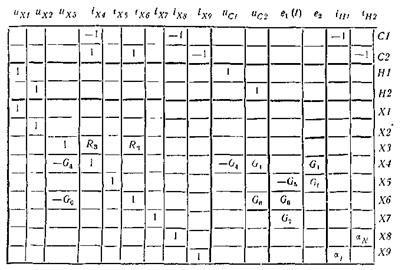
Так как зависимые источники тока управляются токами нелинейных двухполюсников Дк и Дэ, то для разделения линейных и нелинейных компонентов введем управляющие короткозамкнутые дуги по току. Граф схемы с выбранным деревом показан на рис. 4.6, в. Матрица сечений для хорд имеет вид:
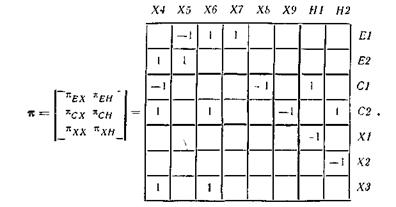
Компонентная матрица Г для линейных безреактивных дуг представляегся следующем образом (для короткозамкнутых дуг иХ1 =0 и иХ2 = 0):
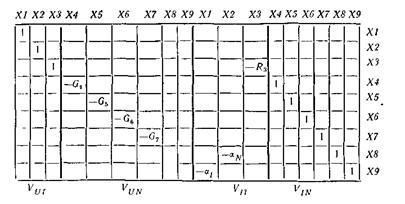
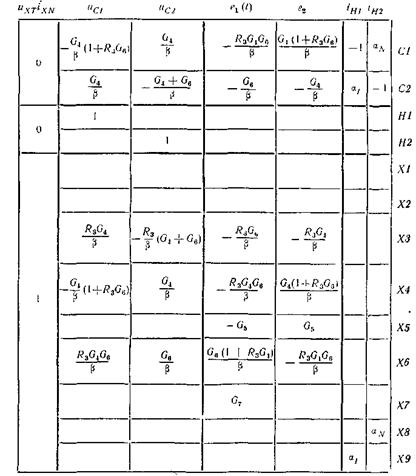
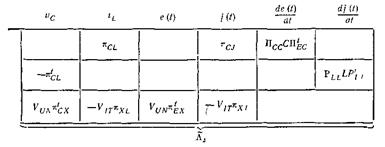
Сформировав соответствующие матрицы, запишем блочную матрицу Λ:
При формировании общих соотношений для формирования матрицы Λ следует иметь в виду, что в рассматриваемом примере некоторые из топологических субматриц отсутствуют или нулевые. Применив алгоритм исключения и обозначив β = 1 +R3(G4+G6), получим:
Отсюда имеем уравнения переменных состояния вместе с нелинейными алгебраическими уравнениями:
![]()
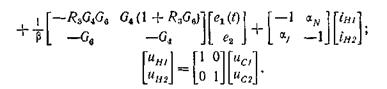
Остальные строки преобразованной матрицы Λ дают уравнения для алгебраических переменных линейных компонентов.
4.9. Выходное уравнение
Подлежащие определению переменные можно рассматривать как составляющие искомого вектора у, который выряжается выходным уравнением через вектор переменных состояний х, задающим вектор v и (в случае нелинейных систем) вектор хН, т. е.
![]()
Если искомые переменные входят в векторы х, х0 и уН, то выходное уравнение формируется непосредственно из соответствующих строк преобразованной матрицы Λ. Так как вектор х0 содержит напряжения ветвей дерева иХТ и токи хорд iXN, то целесообразно включать в дерево (если это возможно) x-дуги искомых напряжений и в дополнение —
x-дуги искомых токов. В общем случае можно получить уравнение для искомой переменной линейной комбинацией строк преобразованной матрицы Λ. Например, для входного тока iвх усилителя (рис. 4.6, а) имеем:
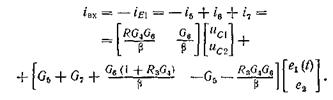
Вхождение искомых переменных в вектр х0 всегда можно обеспечить, вводя фиксирующие короткозамкнутые ветви дерева для токов и разомкнутые хорды для напряжений.
4.10. Ограничения и обобщения
Как видно, что при изложении алгоритма формирования уравнений переменных состояния допускался ряд условий, которые специально не оговаривались, но подразумевались при записи основных соотношений.
Предполагалось, что управляемыми и управляющими являются только дуги безреактивных компонентов, к которым отнесены также короткозамкнутые и разомкнутые дуги, фиксирующие управляющие токи и напряжения. При этом число управляющих величин для данной дуги не ограничивается, но управляющие параметры рассматриваются как постоянные величины.
Ограничение на характер управляющих двухполюсников легко снимается, если функции управления возложить на дополнительно вводимые дуги, фиксирующие управляющие переменные. Последовательно с управляющим по току двухполюсником вводится короткозамкнутая дуга, а параллельно с управляющим по напряжению двухполюсником— разомкнутая дуга (рис.4.7.).
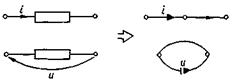
Рис. 4.7. Введение в граф дополнительных управляющих дуг.
Обобщение на случаи управления по нелинейной зависимости достигается введением дуг, фиксирующих управляющие переменные, и отнесением их к множеству дуг нелинейных компонентов.
При этом в векторе хН следует положить нулю компоненты, соответствующие управляющим дугам, что равносильно их удалению совместно с соответствующими столбцами матриц Θ′3, Ω′3 и Q′3.
Алгоритм формирования уравнений переменных состояния можно обобщить и на случаи управления по производной. Для этого необходимо представить дугу, управляющую по производной тока, в виде последовательного соединения двух емкостей с равными (например, единичными) и противоположными по знаку значениями (общая емкость равна бесконечности, и, следовательно, напряжение дуги равно нулю). Параллельно положительной емкости вводится разомкнутая дуга, управляющая по напряжению и =di/dt (рис. 4.8, а).
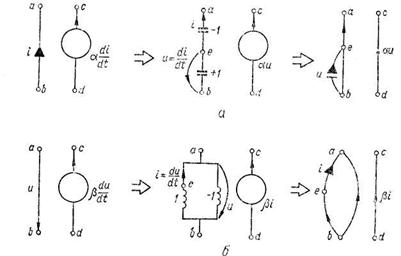
Рис. 4.8. Схемы и графы зависимых источников, управляемых переменных по току (a) и напряжению (б).
Аналогично решается вопрос и с управлением по производной напряжения (рис. 4.8, б). Ясно, что при этом появляются зависимые дифференциальные переменные, которые можно исключить в процессе формирования математической модели.
При моделировании нелинейных систем по изложенному алгоритму дуги всех нелинейных управляемых током компонентов должны войти в дерево, а дуги всех нелинейных управляемых напряжением компонентов — в дополнение (распределение взаимоопределенных дуг нелинейных компонентов между деревом и дополнением произвольное). Это требование является топологическим ограничением, которое служит одним из условий детерминированности системы, т. е. возможности получения для искомых переменных однозначного решения при заданных воздействиях и начальных условиях. Невыполнение этого требования служит признаком того, что система может оказаться недетерминированной. В таких случаях требуются более тонкие методы исследования.
В соответствии с принятой иерархией управляющие по току короткозамкнутые дуги вводятся в дерево после емкостных дуг, а управляющие по напряжению разомкнутые дуги — в дополнение после индуктивных дуг (для нелинейных систем дуги нелинейных компонентов имеют преимущества перед управляющими лугами линейных компонентов).
При этом в дерево попадает минимально возможное число емкостных дуг, а в дополнение — максимальное число индуктивных дуг. Как правило, тем самым обеспечивается вхождение в уравнения только независимых переменных, которые составляют совокупность переменных состояния. Однако при наличии особых контуров с
короткозамкнутыми дугами и особых сечений с разомкнутыми дугами
(см. рис. 4.3) в дерево войдут все емкости таких контуров, а в дополнение — все индуктивности таких сечений. Вследствие этого векторы иСТ и iLN будут содержать зависимые дифференциальные переменные, которые можно исключить в процессе формирования математической модели.
4.11. Исключение зависимых дифференциальных переменных
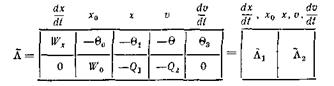
При наличии зависимых переменных математическую модель линейной системы удобно строить на основании одновременного использования уравнений для дифференциальных и алгебраических переменных в виде:

которым соответствует матрица
 i
i
Для получения уравнений относительно вектора dx/dt и x0 необходимо преобразовать матрицу ![]() к такому виду, чтобы
к такому виду, чтобы ![]() 1 была единичной
1 была единичной
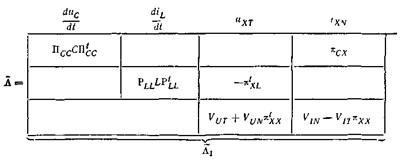
( с точностью до перестановки строк и столбцов). Этого можно достигнуть с помощью алгоритма Гаусса-Жордана. В развернутом виде матрица ![]() записывается следующим образом:
записывается следующим образом:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
