
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для упрощения процедуры приведение уравнений (21) к виду (24) производится с использованием ориентированного графа, который строится на основе уравнений (21). Вершины этого графа изображают переменные уравнений (21): ![]() а величины передач ребер равны соответствующим коэффициентам при переменных.
а величины передач ребер равны соответствующим коэффициентам при переменных.
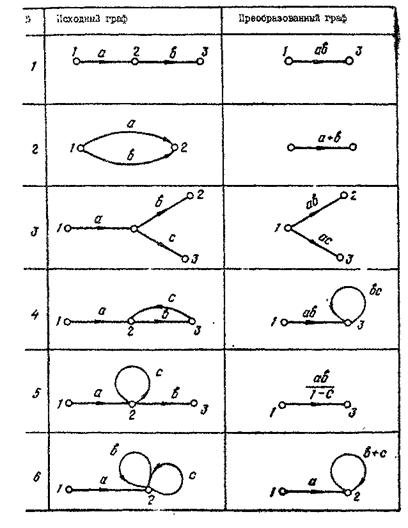
Исходный граф путем последовательных упрощений по известным правилам (табл. 2) приводится к конечному виду, на основании которого записываются уравнения (24).
Таблица 2
Основные правила преобразования сигнальных графов
На следующем этапе описания блоки рассматриваются как новые компоненты системы и процедура описания повторяется.
Блок-схема алгоритма описания расчетной схемы блочным методом показана на рис. 5.
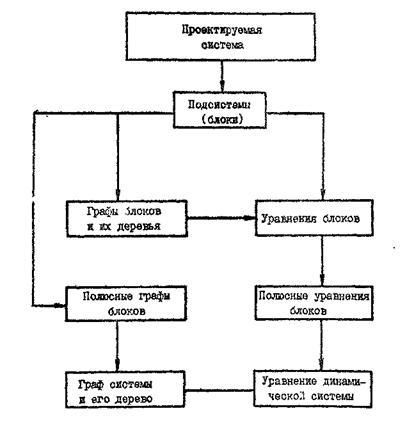
Рис.5
5. МЕТОДЫ ПОИСКА РЕШЕНИЙ УРАВНЕНИЙ ДИНАМИКИ ОБЪЕКТОВ ПРОЕКТИРОВАНИЯ
Уравнения движения систем, характеризующие их динамику и полученные путем математикческого описания расчетных схем, представляют собой системы обыкновенных дифференциальных или алгебро— дифференциальных уравнений.
Методы поиска решений уравнений движений систем разделяются на точные и приближешше. При расчетах динамических характеристик систем вследствие нелинейности уравнений применяются главным образом приближенные методы поиска решений,
При автоматизированном поиске приближенных решений дифференциальных уравнений используются численные методы, в частности одношаговые методы: метод Эйлера и методы Рунге-Кутта, достаточно просто реализуемые на ЭВМ.
Решение дифференциального уравнения первого порядка 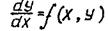 при начальном условии
при начальном условии ![]() производится методом Эйлера по формуле
производится методом Эйлера по формуле
![]() (25)
(25)
где ![]() - шаг интегрирования;
- шаг интегрирования;
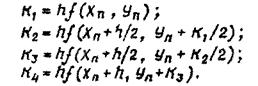
методом Рунге-Кутта по схеме четвертого порядка по формуле
где ![]()
Ошибка метода Эйлера имеет порядок ![]() Метод Рунге-Кутта четвертого порядка имеет ошибку на шаге порядка
Метод Рунге-Кутта четвертого порядка имеет ошибку на шаге порядка![]()
Недостатком метода Эйлера являетег невысокая точность вычислений, в связи с чем этот метод эффективен при поиске решений, используемых в качестве первого приближения.
Достоинствами метода Рунге-Kyттa являются высокая точность и возможность проведения вычислений с переменным шагом. Недостатки метода: необходимость вычисления функции ![]() на каждом шаге в нескольких точках, а также значительные затраты машинного времени, если функция
на каждом шаге в нескольких точках, а также значительные затраты машинного времени, если функция  сложного вида.
сложного вида.
При выборе шага интегрирования руководствуются соображениями устойчивости вычислительной схемы. В качестве критерия устойчивости принимается величина
![]() (27)
(27)
При q≤10-2 схема вычислений считается устойчивой. При q>10-2 шаг интегрирования следует уменьшить и снова проверить величину q.
Метод Рунге-Кутта применим также для приближенного решения дифференциальных уравнений n-го порядка или систем из n дифференциальных уравнений первого порядка. Например, для дифференциального уравнения второго порядка
![]()
приняв![]()
имеем два уравнения первого порядка
![]()
с начальными условиями ![]() и
и![]()
Формулы Рунге-Кутта в этом случае имеют вид
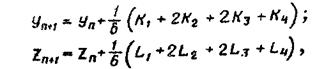 (28)
(28)
где
Поиск решений системы алгебро-дифференциальных уравнений осуществляется путем сведения данной системы к одному дифференциальному уравнению высокого порядка, которое решается численно, например, методом Рунге-Кутта либо на основе специальных численных или чисденно-авалитических методов.
ПРИМЕР СОСТАВЛЕНИЯ МАТЕМАТИЧЕСКОГО
ОБЕСПЕЧЕНИЯ РАСЧЕТА ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ
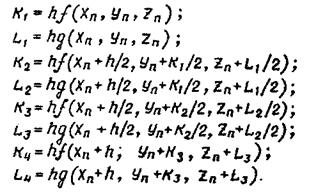
Построить расчетные зависимости для определения нагруженности и угловой скорости механизма, состоящего из цилиндрической зубчатой передачи, вала и маховика (рис. 1, а).
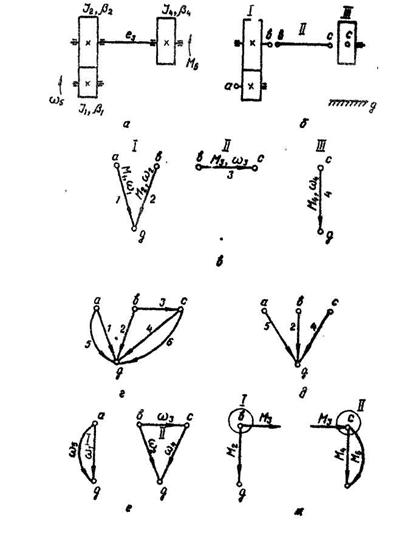
Рис.1
Известны все параметры данной системы, а также внешние воздействия на систему: кинематическое ![]() и силовое
и силовое ![]()
Для составления математической модели системы используем топологический метод описания систем. Разделяем систему на три компоненты: зубчатую передачу I, вал I I и маховик I I I (рис, 1, б). Для каждой компоненты строим полюсный граф (рис, 1, в) и записываем полюсные уравнения: зубчатая передача
![]() (1)
(1)
где
вал
![]() (2)
(2)
где![]()
маховик
![]() (3)
(3)
где
В уравнениях (1) - (3) приняты следующие обозначения:
![]() - моменты, воспринимаемые звеньями механизма.
- моменты, воспринимаемые звеньями механизма.
![]() - угловые скорости звеньев;
- угловые скорости звеньев;
![]() - моменты инерции звеньев;
- моменты инерции звеньев;
![]() - приведенные коэффициенты сопротивлений в опорах звеаьев;
- приведенные коэффициенты сопротивлений в опорах звеаьев;
![]() - коэффициенты, характеризующие приведенную крутильную податливость звеньев.
- коэффициенты, характеризующие приведенную крутильную податливость звеньев.
![]() - передаточное отношение зубчатой передачи;
- передаточное отношение зубчатой передачи;
![]() - оператор дифференцирования.
- оператор дифференцирования.
На основе полюсных графов компонент строим граф системы (рис. 1, г) и выбираем дерево графа (рис, 1, д). В соответствии с выбранным деревом из полюсных уравнении компонент должны исключаться переменные Для определения
Для определения строим фундаментальные контуры I и II (рис. 1, е), из которых соответственно имеем:
строим фундаментальные контуры I и II (рис. 1, е), из которых соответственно имеем:
![]()
Значения ![]() определяем из отсечений I и II (рис. 1, ж):
определяем из отсечений I и II (рис. 1, ж):
![]()
Подставив значения ![]() в уравнения
в уравнения
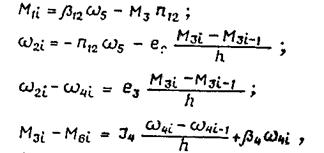
(1) -(3), получим уравнения движения системы:
![]() (4)
(4)
Для поиска решений уравнений (4) применим специальный числе - нно-аналитический метод, являющийся топологической интерпретацией метода Эйлера. С этой целью, заменив в уравнениях (4) производные на конечно-разностные выражения, получим:
 (5)
(5)
где ![]() - шаг интегрирования, i=1,2,…,r.
- шаг интегрирования, i=1,2,…,r.
Уравнения (5) представим в виде конечного ориентированного графа (рис, 2, а), который путем последоватольных преобразований приводится к более простому виду (рис. 2, б, в), на основании которого записываются соответственно значения искомых переменных![]()
 (6)
(6)
 (7)
(7)
 (8)
(8)
где
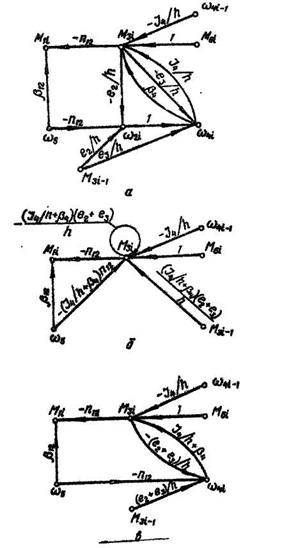
Рис. 2
При i = 1 значения ![]() равны нулю и из уравнений, (6) - (8) определяются значения
равны нулю и из уравнений, (6) - (8) определяются значения 
![]() . При i = 2 значения
. При i = 2 значения  подставляются в уравнения (6) - (8) и определяются
подставляются в уравнения (6) - (8) и определяются ![]() и т. д. до i=r.
и т. д. до i=r.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
