
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Блок (рис. 2.10, а), характеризующийся массой М, моментом инерции τ, радиусом r и сопротивлением трения В, представляется полюсным графом с тремя дугами (рис. 2.10, б) и описываемся системой уравнений:
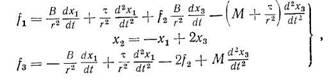
где f1, f2, f3 — силы, приложенные в точках а, b, с; x1 х2, х3 — перемещения этих точек.
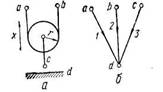
Рис. 2.10. Блок (а) и его полюсный граф (б).
На рис. 2.11 изображена схема с механическими многополюсниками и ее граф.

Рис. 2.11.. Механическая система с многополюсными компонентами (а) и ее граф (б).
Рычаг Р1, представлен на графе дугами 1′ и 2', а рычаг Р2 — дугами 1" и 2" (эти дуги выделены жирными линиями).
2.7. Дифференциальный редуктор
В качестве примера вращательного механического многополюсника рассмотрим дифференциальный редуктор, называемый обычно дифференциалом (рис. 2.12, а). Его полюсами являются три вала, которые осуществляют связь с другими компонентами. Скорость ω0 пропорциональна разности скоростей ωа и ωb, т. е. ωс = n (ωа — ωb). Коэффициент пропорциональности п определяется соотношением
между числом зубьев конических зубчатых колес.
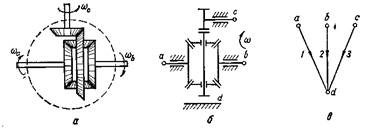
Рис. 2.12. Дифференциал (а), его кинематическая схема (б) и полюсный граф (в).
Кинематическая схема дифференциала показана на рис. 2.12, б, а его полюсный граф – на рис. 2.12, в. Для вывода полюсных уравнений воспользуемся соотношениями динамики для трех валов (без учета трения в подшипниках и упругости валов):
![]()
где J1, J2, J3 – моменты инерции валов вместе с насаженными на них коническими шестернями (J3 учитывает также момент инерции непосредственно сцепленной с валом с части дифференциала ), μ1, μ2 μ3 – внешние вращательные моменты, μ – эквивалентный момент нагрузки, приложенный к первому валу со стороны дифференциала.
Соотношение угловых скоростей при выбранном положительном направлении ω (рис. 2.12,а) имеет вид ω3 = -п(ω1 + ω2).
Подставляя значение ω3 в последнее выражение, находим:
![]()
Заменив в первых двух соотношениях μ через полученное выражение и присоединив соотношение для угловых скоростей, получим полюсные уравнения дифференциала в виде:

Им соответствует матричное уравнение в операторной форме:

где квадратная матрица третьего порядка является гибридной матрицей дифференциала. Как видно, полюсные уравнения нельзя представить относительно моментов, и, следовательно, матрица YД для дифференциала не существует. Они могут быть преобразованы к уравнениям для угловых скоростей, но тогда матрица ZД будет содержать интегральные операторы.
2.8. Двигатель постоянного тока
При рассмотрении систем с электромеханическим преобразованием энергии в качестве многополюсных компонент фигурируют электрические машины. Они обычно представляются несвязными полюсными графами, а их полюсные уравнения выражают зависимости между электрическими и механическими величинами.
Одним из наиболее простых примеров электрических машин является двигатель постоянного тока (рис. 2.13,а).
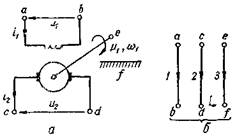
Рис. 2.13. Двигатель постоянного тока (а) и его полюсный граф(б).
Он представляется полюсным графом (рис. 2.13,б), дуги которого соответствуют обмотке возбуждения, электрическому входу и механическому выходу. Полюсные уравнения двигателя имеют вид:
где R1, L1 — сопротивление и индуктивность обмотки возбуждения; R2, L2 — сопротивление и индуктивность цепи якоря; G — коэффициент, зависящий от параметров машины. Два из этих уравнений нелинейны, так как в них входят произведения переменных.
В частном случае, при постоянном напряжении возбуждения
(и1 = const) и отсутствии реакции якоря, ток возбуждения также постоянен (i1 =i0). Уравнения становятся линейными и в матричной форме принимают вид:
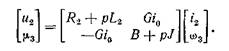
Соответственно, двигатель представляется четырехполюсником, и его полюсный граф содержит только дуги 2 и 3.
2.9. Гидромеханические многополюсники
В технике широко используются различные гидромеханические системы в качестве исполнительных механизмов, усилителей, гидроприводов и т. п. Их можно также рассматривать как соединение многополюсных компонент. Приведем некоторые примеры гидромеханических многополюсников.
Управляющий золотник (рис. 2.14, а) представляет собой многополюсник с механическим входом, характеризующимся силой f1 и перемещением х, и гидравлическим выходом, характеризующимся разностью давления р2 и объемным потоком жидкости g2.
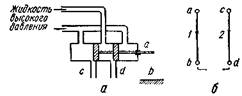
Рис. 2.14. Управляющий золотник (а) и его полюсный граф (б).
Полюсный граф (рис. 2.14, б) состоит из двух дуг, первая из которых отображает механический вход, а вторая — гидравлический выход. Полюсные уравнения управляющего золотника имеют вид:
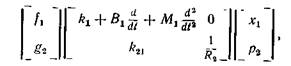
где В1 и М1 — соответственно вязкое сопротивление и масса золотникового поршня; R2 — гидравлическое сопротивление; k1 и k21— коэффициенты, определяемые из эксперимента.
Силовой цилиндр (рис. 2.15, а) служит для преобразования гидравлического давления в механическую силу.
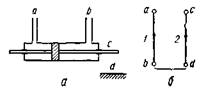
Рис. 2.15. Силовой цилиндр (а) и его полюсный граф.
Дуги полюсного графа (рис. 2.15, б) соответствуют гидравлическому входу (объемный поток g1 и давление р1) и механическому выходу (сила f2 и перемещение х2 поршня). Полюсные уравнения силового цилиндра можно представить в виде:
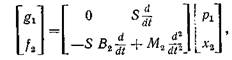
где S —площадь поршня; В2 и М2 — соответственно вязкое сопротивление и масса поршня.
Управляющий золотник и силовой цилиндр образует совместно гидравлический исполнительный механизм (рис. 2.16, а), позволяющий при небольших управляющих усилиях и перемещениях на входе золотника получать значительные силы и перемещения на выходе силового цилиндра.
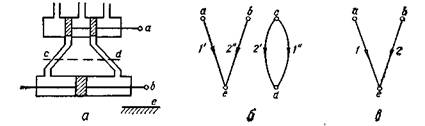
Рис. 2.16. Гидравлический исполнительный механизм (а) и его
графы (б, в).
Необходимая для этого энергия поступает от внешнего источника давления гидравлической системы. Граф гидравлического исполнительного механизма (рис. 2.16, б) получается объединением полюсных графов его компонентов (дуги управляющего золотника отмечены штрихом, а дуги силового цилиндра — двумя штрихами).
Гидравлический исполнительный механизм также можно рассматривать как многополюсный компонент с механическим входом
(f1, х1) и выходом (f2, х2) и представить соответствующим полюсным графом (рис. 2.16, в). Исключая из уравнений золотника и силового цилиндра переменные g1 = g2 и р1 =р2 получаем полюсные уравнения, соответствующие этому графу:

В гидроусилителе (рас. 2.17, а) гидравлический механизм используется совместно с рычагом в качестве обратной связи между входом и выходом, которая обеспечивает автоматическое закрывание золотника, когда силовой поршень занимает требуемое положение. В полюсном графе гидроусилителя (рис. 2.17, б) дуги 1' и 2' изображают гидравлический механизм, дуги 1" и 2" — рычаг, а дуги 1 и 2 — соответственно входное и выходное усилия.
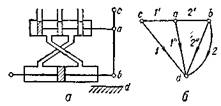
Рис. 2.17. Гидроусилитель (а) и его полюсный граф (б).
2.10 Схемные модели многополюсных компонентов
Один из распространенных методов представления многополюсных компонентов основан на использовании их схемных моделей, состоящих из двухполюсников и называемых часто схемами замещении или эквивалентными схемами. Вид схемной модели компонента зависит от режима его работы, требуемой точности описания его свойств и поставленной задачи.
В качестве примера на рис. 2.18 показаны две схемные модели транзистора.
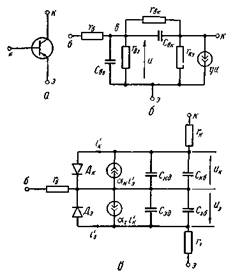
Рис. 2.18. Схемные модели транзистора (а), высокочастотная модель в квазилинейном режиме (б) и нелинейная модель Эберса-Молла (в).
Одна из них (рис. 2.18,б) является высокочастотной моделью в квазилинейном режиме (при слабых сигналах). Она содержит линейные резистивные и емкостные двухполюсники и источник, ток которого j= gи линейно зависит от напряжения и между узлами b и э.
Модель Эберса-Молла (рис. 2.18, в) представляет транзистор в режиме больших сигналов и содержит нелинейные емкости

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
