
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
(Cкб, Сэб, Скд, Сэд) и резисторы (Дк, Дэ), а также источники, токи которых выражаются через токи i'к и i'э посредством коэффициентов αN и αI.
Характерной особенностью схемных моделей многополюсных
компонентов являются наличие в них зависимых источников, токи или
напряжения которых могут зависеть от токов или напряжений в любой части схемы. На рис. 2.19 показаны четыре основных типа зависимых источников: источники тока, управляемые током (рис 2.19, а) или напряжением (рис. 2.19, б), и источники напряжения, управляемые током (рис. 2.19, в) или напряжением (рис. 2.19, г ) Величины α, g, r, μ, являющиеся коэффициентами пропорциональности в уравнениях зависимых источников, называют управляющими параметрами.
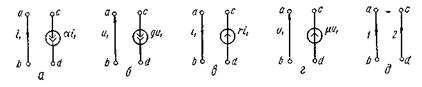
Рис. 2.19.Типы зависимых источников (а, б,в, г) и их полюсный граф (д).
Полюсный граф зависимого источник, в отличие от обычного двухполюсника, состоит из двух дуг (рис. 2.19,д). Первая из них отображает величину (ток или напряжение), которая управляет зависимым источником и называется управляющей дугой. Вторая представляет собственно источник и называется управляемой дугой. Чаще всего управляющие величины связаны с некоторыми двухполюсниками схемы (например, величину и на рис. 2.18, б можно рассматривать как напряжение на двухполюсниках C вэ или rвэ, а управляющие токи i'K и i'э на рис. 2.18, в— как токи двухполюсников Дк и Дэ. В таких случаях роль управляющей дуги играет дуга того двухполюсника, ток или напряжение которого управляет зависимым источником.
В общем случае управляющие величины фиксируются в полюсном графе коротко-замкнутыми (для тока) и разомкнутыми (для напряжения) дугами. Аналогичные дуги можно вводить в полюсный граф для фиксации любых токов и напряжений, непосредственно не связанных с компонентами, но представляющих интерес при анализе системы (например, входные и выходные величины, напряжение между любой парой узлов, ток в любом проводнике и вообще, любая искомая величина). Если требуется выделить фиксирующие дуги, то для них используются специальные обозначения (рис. 2.20), причем направление дуги всегда совпадает с направлением тока (поперечной величины).
![]()
Рис. 2.20. Условные обозначения короткозамкнутой (а) и разомкнутой (б) дуг.
Короткозамкнутая управляющая (или фиксирующая) дуга описывается уравнением и = 0 и поэтому всегда является z-дугой. Разомкнутая управляющая (или фиксирующая) дуга описывается уравнением i = 0 и относится к у-дугам. Управляемые дуги зависимых источников тока в соответствии с их уравнениями i2 =αi1 или i2 = gu1 являются у-дугами, а управляемые дуги зависимых источников напряжения в соответствии с уравнениями и2 = ri1 или и2 =μ и1 являются z-дугами.
Представление многополюсных компонентов схемными моделями применимо не только к электронным, но и к другим системам, а изложенные здесь положения распространяются на них по аналогии.
ЗАДАЧИ И УПРАЖНЕНИЯ
1. Выразить продольные переменные пятиполюсника (см. рис. 2.1, б) через полюсные переменные при условии, что в качестве базисного узла выбран узел 3.
2. Изменится ли полюсный граф многополюсника при изменении:
а) формы уравнений многополюсника;
б) базисного полюса?
3. Какие дуги полюсного графа системы с многополюсными компонентами имеют:
а) фиксированные направления;
б) произвольные направления?
4. К какому типу (у,z, w) относятся дуги полюсного графа электровакуумного триода?
5. К какому типу относятся дуги полюсного графа транзистора при условии, что он описывается:
а) r-параметрами;
б) g-параметрами;
в) h-параметрами?
6. Значения h-параметров транзистора в схеме с общей базой следующие:
h11б = 62 Ом; h12б = 0,5·10-3 Ом; h21б = — 0,97Ом; h22б = 10-6 Ом. Определите g-параметры и r-параметры в схеме с общей базой, воспользовавшись зависимостями, приведенными в (2.4).
7. Покажите, что r-параметры транзистора в схемах с общим эмиттером и общим коллектором выражаются через r-параметры в схеме с общей базой зависимостями:
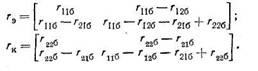
Воспользовавшись этими зависимостями, определите численные значения r-параметров в схемах с общим эмиттером и общим коллектором по значениям r-параметров в схеме с общей базой, полученным в задаче 6.
8. Постройте графы транзисторной схемы (см. рис. 2.5, а) при следующих вариантах выбора базисных полюсов транзисторов:
а) Т1 с общим коллектором и Т2 с общей базой;
б) T1 с общей базой и Т2 с общим коллектором;
в) T1 и Т2 с общим эмиттером.
9. Постройте граф схемы с индуктивными связями (рис. 2.20) и запишите уравнения индуктивно связанных двухполюсников.
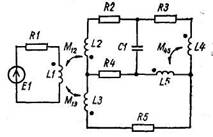
Рис. 2.20. Схема с индуктивными связями.
10. Постройте граф механической системы (рис. 2.21), использовав полюсные графы рычага и блока.
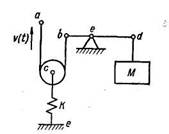
Рис. 2.21. Механическая система с многополюсными компонентами.
11. Постройте граф гидравлической системы (рис. 2.22) при условии, что насос создает постоянное давление в заданных потоках g1, g2, g3.
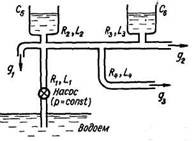
Рис. 2.22. Гидравлическая система.
12. Постройте графы схемных моделей транзистора (см. рис. 2.18, б, в) и укажите, какие из дуг имеют фиксированные направления.
13. В графы, построенные в задаче 12, введите разомкнутые и короткозамкнутые управляющие дуги. Сформулируйте правило выбора направлений управляющих дуг.
3. СИСТЕМЫ КООРДИНАТ
3.1. Математические модели физических систем
При построении математической модели физической системы исходные данные должны содержать сведения о структуре системы и свойствах входящих в нее компонентов. Полюсный граф совместно с уравнениями связей позволяет получить зависимости между переменными, которые связаны с выбранной надлежащим образом совокупностью независимых сечений и контуров. Эти зависимости отражают структурные свойства системы и называются топологическими уравнениями, причем сечения и контуры играют роль системы координат, в которой представляется математическая модель. Совокупность полюсных уравнений, связывающих переменные отдельных компонентов, составляет компонентные уравнения.
Топологические и компонентные уравнения дают полное описание системы и путем их преобразования можно получить математические модели различных типов. Естественно стремление к таким моделям, которые содержат возможно меньшее число переменных, наиболее удобны по форме и требуют минимальных усилий при их построении.
Часто имеется возможность сформировать математическую модель в однородной системе координат, в качестве которых выступают сечения или контуры. Соответственно получаем уравнения сечений и уравнения контуров. Однако в общем случае приходится прибегать к неоднородным системам координат, когда переменные связаны как с контурами, так и с сечениями. Система координат называется сокращенной, если используется только часть сечений и контуров полюсного графа,
В результате целенаправленного преобразования топологических и компонентных уравнений получаем систему уравнений, которую можно представить в матричной форме следующим образом:
W X =FQ
Квадратная матрица W и матрица Q, элементы которых выражаются через параметры компонентов и интегродифференцнальные операторы, полностью определяют систему уравнений относительно вектора переменных X. Вектор F содержит в качестве своих компонент заданные функции, характеризующие независимые источники.
Решение уравнения W X =FQ относительно вектора X позволяет получить совокупность независимых переменных, через которые определяются и любые другие переменные, характеризующие состояние системы. Часто возникает задача представления модели физической системы относительно ее сторон – входов и выходов. Тогда уравнение W X =FQ преобразуется к такому виду, чтобы оно содержало только входные и выходные переменные, а остальные переменные были исключены.
Если требуется получить математическую модель в дифференциальной форме, то необходимо обеспечить такую процедуру ее формирования, чтобы матрица W не содержала интегральных операторов. Обычно эта цель достигается в неоднородных системах координат или принимаются какие-либо специальные методы преобразования полюсных графов и полюсных уравнение компонентов системы. Уравнение W X =FQ в дифференциальной форме может быть преобразовано в уравнение переменных состояния, которое для линейной системы имеет вид:
![]()
где х — вектор переменных состояния и v —задающий вектор, связанные между собой матрицами А и В.
Общая процедура преобразования исходных данных к математическим моделям системы показана на рис. 3.1.

Рис. 3.1 Преобразование исходных данных к математическим моделям системы.
3.2. Топологические уравнения
Уравнения связей для вершин (р, q)-графа можно записать в матричной форме
A0ηд=0,
где A0 — сокращенная матрица инцидентности ; ηд = (η1, η2, .... ηq) — вектор поперечных величин дуг графа.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
