
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пример 4. Фильтр с равноволновой характеристикой, передаточная функция которого имеет седьмую степень:
 (63)
(63)
Расчет фильтра был проведен на ЭВМ. В результате расчетов получена схема фильтра (рис. 10).

Рис. 10. Реактивный фильтр, передаточная функция которого определяется по формуле (63).
Средствами ЭВМ в результате 10 итераций определены следующие значения элементов:
L1 = 1,154722 гн,
L3 = 1,675625 гн,
С2 = 1,112944 ф,
С4 = 0,615818 ф,
С5 = 4,6188886 ф,
С6 = 1,11286 ф,
R7 = 1 ом,
R8 = 1,13542 ом.
Пример 5. Фильтр с оптимально монотонной характеристикой (Папулиса) с передаточной функцией пятого порядка
 (64)
(64)
Расчет этого фильтра также был проведен на ЭВМ. Значения элементов получены в результате 5 итераций. Схема фильтра показана на рис. 11.
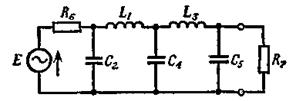
Рис. 11. Реактивный фильтр, передаточная функция которого определяется по формуле (64).
Значения элементов фильтра равны
L1 = L3 = 1,466371 гн,
С2 = С5 = 0,7479164 ф,
С4 = 0,4263531 ф,
R6 = R 7 = 0,9644312 ом.
Пример 6. Фильтр на индуктивностях с потерями, с максимально плоской характеристикой (Баттерворта), передаточная функция пятого порядка которого имеет вид

Расчет этого фильтра был проведен в два этапа. Вначале был рассчитан фильтр без потерь с передачей

Расчет этого фильтра был проведен за 6 итераций.
На втором этапе были учтены потери в индуктивностях, причем в качестве начальных значений параметров элементов принимались величины, полученные в конце первого этапа. В результате 3 итераций были получены следующие значения элементов фильтра:
L1 = L2 = 1,2595972 гн,
r1 = r2 = 7,4542268·10-2 ом,
C1 = С3 = 1,2375818 ф,
С2 = 0,37590573 ф,
R1 = R2 = 0,7939046 ом.
Схема рассчитанного фильтра изображена на рис. 12. 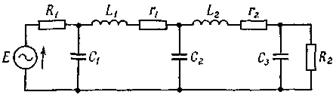
Рис. 12. Реактивный фильтр, передаточная функция которого определяется по формуле (65).
В заключение следует обратить внимание еще на одно достоинство представленного здесь метода синтеза фильтров. Этот метод не требует особой точности расчета, что необходимо при других методах синтеза реактансных фильтров, как, например, в методах Бруне или Кауэра. Это положение следует из вида линейных уравнений (57), на основании которых рассчитываются значения элементов фильтра, так как в этих уравнениях производится только умножение и сложение неизвестных и не требуется выполнения операций вычитания и деления. Это серьезное достоинство, обеспечивающее достаточную точность расчета величин элементов без необходимости применения особых методов увеличения точности расчета.
В приведенных выше примерах расчеты проводились для передач с нормированием по частоте и сопротивлению. Для расчета элементов фильтров, удовлетворяющих определенным техническим условиям, необходимо еще провести денормирование значения элементов. Так как это элементарная операция, она не программируется. Преобразование полученных прототипов фильтров низких частот в фильтры других типов, например полосовых фильтров, фильтров высоких частот или режекторных фильтров, можно легко провести при помощи преобразования частоты.
Приведенные расчеты касались фильтров с очень простой структурой. Однако метод расчета фильтров, представленный ниже, позволяет проводить расчет фильтра произвольной сложности.
10.2.4. Метод расчета элементов четырехполюсников
Задаются следующие исходные данные: блочная группа графа заземленного четырехполюсника, функция совпадения этой блочной группы, а также коэффициент передачи напряжения четырехполюсника. Алгоритм метода определяет систему нелинейных уравнений (алгебраических), из которых находятся элементы четырехполюсника: величины сопротивлений, емкостей, индуктивностей. Расчет состоит в определении решений линеаризованных систем уравнений методом Ньютона (путем последовательных приближений) .
10.2.4.1. Система уравнений, определяющих коэффициент передачи напряжения четырехполюсника
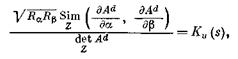
Система уравнений для определения параметров четырехполюсника при заданном коэффициенте передачи напряжения составляется с помощью формулы
 (65)
(65)
где Аd —дополнительная блочная группа, связанная с графом четырехполюсника; α — номер входной ветви; β — номер выходной ветви; Rα — сопротивление входной ветви; Rβ — сопротивление выходной ветви; Ки(s) — коэффициент передачи напряжения четырехполюсника, являющийся рациональной функцией переменной s. В дальнейшем приняты следующие ограничения.
а) блочная группа Ad описывает заземленную структуру четырехполюсника;
б) в каждой ветви четырехполюсника находится один элемент определенного типа (емкость, сопротивление или индуктивность). Ограничение б) не сужает класс решаемых задач и значительно увеличивает быстроту расчетов.
Система уравнений получается из формулы (65) путем приравнивания коэффициентов при переменной s в правой и левой сторонах числителя и знаменателя. Получается зависимость между величинами С-1, R или L ветви четырехполюсника и коэффициентами числителя и знаменателя коэффициента передачи.
Из однородности полученной системы уравнений следует, что параметры элементов четырехполюсника можно определить с точностью до коэффициента пропорциональности.
Знаменатель левой дроби формулы (65) — однородный многочлен относительно элементов, имеющий степень, равную числу ветвей в деревьях Ad (N [5]); числитель — однородный многочлен степени N[5]— 1=N [7], умноженный на ![]() .
.
Блочная группа Ad и ее функция совпадения выражаются через номера ветвей. Коэффициент передачи напряжения задан коэффициентами знаменателя и числителя, представляющими действительные числа, и степенями переменной s (целые числа).
10.2.4.2. Расчет величин, определяющих систему уравнений
Столбец блочной группы Ad (дерево) определяет произведение элементов, находящихся в этом дереве (ограничение б)), и представляет собой одночлен относительно элементов. Все одночлены с одинаковыми показателями степеней s суммируются и приравниваются коэффициентам многочлена передаточной функции с той же степенью s.
Уравнение для числителя получается аналогично, но с той разницей, что полученный многочлен вначале умножается на ![]() . Система уравнений имеет вид
. Система уравнений имеет вид
F (х1, . . ., хп) = 0,
i = 1, 2, . . ., пr = N [3] + N[4], n=N[1] — N [2]. (66)
N[2] переменных исключается, поскольку приравниваются величины некоторых элементов.
10.2.4.3. Расчет якобиана уравнений (66)
Метод решения, применяемый к системе уравнений (66), предполагает расчет якобиана в любой точке X = (x1.. ., хп). Обозначим
Ii, k (X 1, x1.. ., хп)= 
i = 1, ...,пr; k = 1,2, ...,n. (67)
Расчет аналогичен расчету Fi, изложенному в разд. 7.2.4.2. Для величин Fi, определяемых многочленом знаменателя (65), составляются одночлены из переменных, номера которых находятся в столбцах Ad, при этом по очереди опускается по одной переменной.
Сумма одночленов, образующих Fi, в которых пропущена переменная xk, создает Ii, k (X). Аналогично поступают и для Fi, определяемых числителем, только одночлены умножаются на  .
.
Дифференцирование относительно Rα и Rβ (присутствующих в формуле только в множителе ![]() ) более сложно.
) более сложно.
10.2.4.4. Метод Ньютона
Система (66) заменяется линейным приближением
F(X) + I(X)∆X =0, (68)
где
X — матрица-столбец ![]() ;
;
F (X) — матрица-столбец  ;
;
I (X) — матричный якобиан Ii, k (X)=  ;
;
∆(X) — матрица-столбец приращений ![]() .
.
Систему (68) можно решить относительно ∆(X), если она непротиворечива. Достаточным условием этого является равенство рядов матриц
I (X), а также  .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
