
Сопротивление (рис. 1.10, а) — двухполюсник, учитывающий рассеивание энергии за счет вязкого трения. Его уравнение может быть представлено в одной из двух форм:
![]()
где параметры G и R называются соответственно пневматическими проводимостью и сопротивлением (G = R-1, R = G-1). Величина рR (t) представляет собой разность давлений на концах этого двухполюсника при потоке gR(t). Примерами пневматических компонент с явно выраженным сопротивлением являются трубки с тонкими отверстиями (капилляры), сужающие устройства (сопла), щели и различные препятствия на пути движения газа.
Инертность (рис. 1.10, б) является двухполюсником, который характеризует противодействие изменению потока газа в среде и описывается соотношениями:
где L — параметр, называемый пневматической инертностью. Величина pL(t) представляет собой разность давлений на концах этого двухполюсника при потоке gL(t). Пневматическая инертность заметно сказывается в трубопроводах при существенных изменениях потока газа во времени.
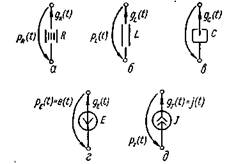
Ряс. 1.10. Идеальные пневматические двухполюсники:
а — сопротивление; б — инертность; в - упругость; г — источник давления; д — источник потока
Упругость (рис. 1.10,в) - двухполюсник, характеризующий свойство идеального газа, заключенного в некотором объеме (камере): изменение концентрации молекул пропорционально изменению давления (предполагается, что процесс изотермический, т. е. происходит при постоянной температуре). Так как изменение концентрации определяется потоком газа, то для этого двухполюсника можно записать соотношения:
![]()
где С — параметр, называемый пневматической упругостью. Величина рС(t) представляет собой давление газа в объеме относительно давления, которое принимается за нулевое (например, относительно атмосферного давления или вакуума). Поэтому один из полюсов рассматриваемого двухполюсника связан с данным объемом, а второй - со средой, выбранной за начало отсчета давления.
Между пневматическими и электрическими системами существует глубокая аналогия. Поток соответствует току, давление — потенциалу, разность давлений — напряжению, избыточная концентрация молекул (по сравнению с условным уровнем) — заряду. Поэтому и соответствующие параметры пневматических и электрических двухполюсников обозначают обычно теми же буквами (R, L, С). Инертность часто называют пневматической индуктивностью, а упругость — пневматической емкостью.
Источники энергии в пневматических системах представляются идеальными двухполюсниками дпух типов: источником давлении (рис. 1.10, г) и источником потока (рис. 1.10, д), которые определятся соответственно задающими давлением е(t) и потоком j(t), a также положительными направлениями этих величин.
При построении схемы пневматической системы узлы соответствуют объемам газа с различными давлениями, причем одни из них соответствует окружающей среде. На рис. 1.11 показан пример пневматической системы, ее схема и граф
Уравнения связей пневматической системы выражают условие непрерывности потоков и условие равновесия разностей давлений:
1) алгебраическая сумма потоков для любой вершины равна нулю:
∑g(t) = 0;
2) алгебраическая сумма разностей давлений в любом контуре равна нулю:
∑р(t)= 0.
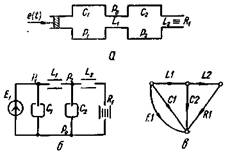
Рис. 1.11. Пневматическая система (а), ее схема (б) и граф (в).
Приведенные соотношения применимы также к акустическим и гидравлическим системам лишь с тем отличием, что поток g(t) обычно рассматривается как изменение объема в единицу времени( объемный расход). Иногда под этой величиной понимают весовой (массовый) расход.
1.7. Аналогии
Из рассмотренного выше видно, что для систем различной физической природы имеет место аналогия между их компонентами и переменными, характеризующими состояния системы. Идя по пути обобщения, лучше всего было бы принять некоторую нейтральную терминологию для поперечных и продольных величин, а также для трех типов идеальных двухполюсников. Однако из-за отсутствия единой договоренности в этом вопросе чаще всего в качестве основной принимают терминологию электрических цепей. Отсюда возникли электромеханические, электропневматические, электрогидравлические и другие аналогии (табл. 1.1).
Таблица 1.1
Аналогии электрических величин
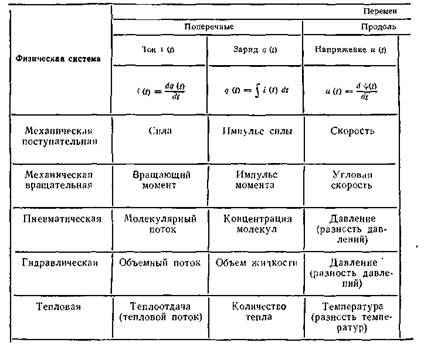

В первой строке табл. 1.1 приведены основные соотношения в обозначениях, принятых в теории электрических цепей. Для рассматриваемой системы соответствующие соотношения можно получить, заменив электрические величины и параметры аналогичными величинами и параметрами, которые указаны в остальных строках таблицы.
Приведенная таблица может быть расширена и на другие системы, не рассматривавшиеся выше, для этого необходимо на основе законолв равновесия выяснить, какие величины являются поперечными и какие продольными. Затем, сравнивая компонентные уравнения двухполюсников данной системы с уравнениями электрических двухполюсников, установить аналогии между соответствующими компонентами.
1.8. Нелинейные и параметрические компоненты
Характер компонентных уравнений не влияет на вид полюсного графа системы, но методы использования этого графа при построении математической модели системы в значительной мере определяются свойствам компонент. Поэтому уместно привести основные соотношения для нелинейных и параметрических компонент в терминах электрических цепей.
В общем случае зависимость между током и напряжением резистивного компонента выражается функцией φ(i,и)=0, которая может быть представлена в одной из двух форм:
i= φG(u); u= φR (i).
Первое соотношение описывает резистор (проводимость), представляемый напряжением и представляемый у-дугой, а второе — резистор (сопротивление), управляемый потоком, и представляемый z-дугой. На рис. 1.12, а, б, показаны характеристики двухполюсников, допускающих единственное представление. Если характеристика монотонно возрастающая (рис. 1.12, в), то ее можно выразить однозначной функцией как тока, так и напряжения.
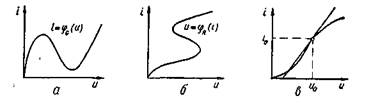
Рис 1.12. Характеристики нелинейных резисторов:
а — управляемого напряжением (а), током (б) и взаимоопределенного (в)
Соответствующий двухполюсник является взаимоопределенным и представляется w-дугой.
Нелинейные резистивные компоненты часто используются в квазилинейном режиме, при котором токи и напряжения изменяются относительно некоторой точки покоя (i0, и0), причем эти изменения настолько малы, что рабочий участок характеристики можно считать линейным. Разлагая функцию i= φG(и) в ряд Тейлор и ограничиваясь членом с первой производной, можно записать:
i= φG(и0)+ φ′G(и0)( и_- и0) = i0 + φ′G(и0)( и-и0)
или
![]()
Здесь ∆i = i — i0 и ∆и = и — и0 - изменения тока и напряжения относительно точки покоя. Величина GД численно равна производной функции в этой точке и называется динамической проводимостью, а обратная ей величина RД — динамическим сопротивлением:
![]()
Соотношения для параметрического резистора линейны, но его проводимость и сопротивление являются функциями времени, т. е.
iG (t)=G( t)uG(t), uR (t)= R(t)iR (t)
Нелинейный емкостный двухполюсник характеризуется обычно зависимостью заряда oт напряжения на этом двухполюснике
q(t)= q(uC(t)). Дифференцируя по времени, получаем выражение для тока в виде:
![]()
где С(uC) определяет динамическую емкость, зависящую от приложенного напряжения uC. Емкость параметрического ( линейного, но не стационарного) двухполюсника является функцией от времени. Поэтому, дифференцируя соотношение q(t) = C(t) uC(t), имеем:
![]()
Нелинейный индуктивный двухполюсник можно охарактеризовать зависимостью потокосцеплепия от тока в индуктивности
ψ(t) =ψ (iL(t)). Дифференцируя по времени, получаем выражение для напряжения в виде:
![]()
где функция L(iL) определяет динамическую индуктивность, зависящую от протекающего тока iL . Индуктивность параметрического двухполюсника является функцией от времени. Поэтому дифференцируя соотношение ψ(t) = L(t ) iL(t) имеем:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
