
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Управляемые G-дуги зависимых источников тока могут управлять другими источниками только по напряжению, а управляемые R-дуги зависимых источников напряжения — только по току. Таким образом, остается наложить запрет на управление G-дугами зависимых источников тока по току и R-дугами зависимых источников напряжения — по напряжению. Если такая ситуация все же имеет место, то она легко устраняется на этапе подготовки данных путем преобразования управляющих параметров. Пусть, например, зависимый источник тока, управляемый напряжением uj, некоторого двухполюсника и описываемый уравнением ik =guj, сам управляет по току источником напряжения. Тогда последний можно представить уравнением us = rik = rguj =тиj, и считать, что он также управляется напряжением uj, двухполюсника с управляющим параметром т = rg. Аналогично преобразуются управляющие параметры и в других подобных случаях.
Излагаемая процедура формирования уравнений допускает управление зависимыми источниками и со стороны независимых источников как по току, так и по напряжению. Однако если независимые источники напряжения не управляют по току, а независимые источники тока — по напряжению, то переменные iE и uJ можно исключить из системы уравнении путем удаления соответствующих им столбцов и строк. Это обусловлено тем, что в столбцах для таких переменных имеется единственный ненулевой элемент (единица), расположенный в исключаемой строке.
5.10. Введение реактивных параметров
После введения параметров безреактивных двухполюсников по процедуре, представленной на рис. 5.8, получаем матричное уравнение в виде:

Реактивные параметры вводятся в соответствии с соотношениями для емкостей:

и для индуктивностей

Здесь СT и СN — матрицы емкостей; LT и LN— матрицы индуктивностей реактивных дуг фундаментального дерева и дополнения. С учетом приведенных соотношений слагаемые для реактивных переменных преобразуются следующим образом:

Появление производных задающих напряжений e(t) и токов j(t) обусловлено наличием особых контуров и сечений, что индицируется ненулевыми субматрицами πEC и πLJ.
Матрицы СT и СN диагональные, а при отсутствии индуктивных связей диагональными являются также матрицы LT и LN. Поэтому реактивные параметры можно ввести по схеме, приведенной нa рис. 5.9.
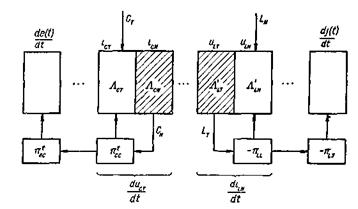
Рис. 5.9. Введение параметров реактивных компонентов.
Столбцы для токов емкостных дуг умножаются на соответствующие емкости, после чего столбцы для емкостных хорд суммируются со столбцами для емкостных ветвей дерева в соответствии с субматрицей πtСС. В результате получаем столбцы для производных напряжений емкостных ветвей дерева. Столбцы для производных независимых источников напряжения получаются в соответствии с оператором, которым служит субматрица πtЕС. Аналогично вводятся и параметры индуктивных двухполюсников.
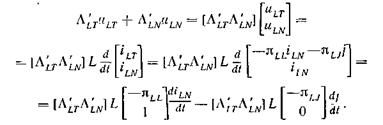
Если между двухполюсниками дерева и дополнения имеются индуктивные связи, то необходимо исходить из соотношения
![]()
где L —матрица, элементами которой являются собственные и взаимные индуктивности.
Тогда члены полученного ранее матричного уравнения, которые содержат напряжения на индуктивностях, преобразуются следующим образом:
5.11. Разделение переменных
Формирование математической модели в пространстве переменных состояния завершается разделением переменных. Эта процедура сводится по существу к решению уравнений в сокращенном координатном базисе относительно производных переменных состояния иСТ и iLN, переменных нелинейных компонентов iНT и uHN, а также токов iE, iS, iRN и напряжений иJ, uQ, uGT.
Если параметры реактивных компонентов постоянны, то для разделения переменных можно использовать алгоритм Гаусса — Жордана по соответствующим столбцам. В результате, получаем уравнения переменных состояния вместе с присоединенными к ним нелинейными и выходными уравнениями.
Если физическая система содержит нелинейные или параметрические реактивные компоненты, то целесообразно из ее уравнений, полученных с помощью обобщенной процедуры (см. рис. 5.8), исключить алгебраические переменные iE, iRN, иGТ, иJ, а также те переменные из iS и uQ, которые не являются выходными величинами. После этого на каждом шаге интегрирования вводятся реактивные параметры и полученные уравнения решаются методами неявного интегрирования или преобразуются к уравнениям переменных состояния.
На рис. 5.10. показано применение обобщенной процедуры формирования уравнений в сокращенном координатном базисе для транзисторного усилителя, рассмотренного в (4.8).
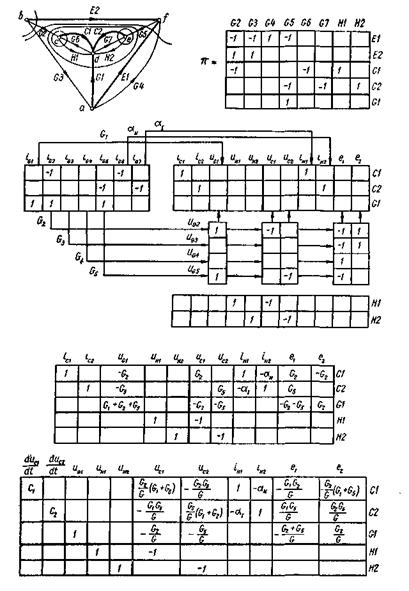
Рис. 5.10. Формирование уравнений транзисторного усилителя в сокращенном координатном базисе.
По условию оптимального разбиения все линейные резисторы представлены G-дугами, причем для них приняты другие обозначения по сравнению с теми, которые приведены в (4.8): дуги X3, Х4, Х5, Х6, Х7 обозначены соответственно через G5, G2, G3, G1, G4, а их проводимости — через G5, G2, G3, G1, G4. Зависимые источники тока представлены дугами G6 и G7, которые ранее были обозначены через Х8 и Х9. На основе полученной матрицы математическая модель в пространстве переменных состояния записывается в виде:

5.12 .ЗАДАЧИ И УПРАЖНЕНИЯ
1. Покажите, что матрица W в сокращенном координатном базисе для систем, состоящих только из двухполюсных компонентов, всегда кососимметрична.
2. Выведите из уравнения WX = QP в сокращенном координатном базисе уравнения в однородных системах координат, как частные случаи, когда граф системы содержит только:
а) у-дуги, управляемые продольными величинами;
б) z-дуги, управляемые поперечными величинами.
3. Определите количество сокращаемых координат, и для графа на рис.5.1, а при следующих разбиениях взаимоопределеппых дуг:
а) y-дуги — 1, 2, 3, 9; z-дуги — 4, 5, 14.
б) y-дуги — 1, 4, 9; z-дуги — 2, 3, 5, 14.
Сравните результаты со значением μ полученным при оптимальном разбиении взаимоопределенных дуг.
4. Из уравнений для гидромеханической системы в неоднородном координатном базисе, полученных в (4.3), выразите переменные х4, f8 и сравните с уравнениями в сокращенной системе координат (5.5).
5. Сформируйте уравнение в сокращенном координатном базисе для механической системы (см. рис. 2.11, а).
6. Для электрической схемы (см. рис. 4.5, а) выполните оптимальное разбиение взаимоопределенных дуг и сравните выбор дерева, определяющего неоднородный (рис. 4.5, б) и сокращенный (рис. 5.6) координатный базис. Объясните различие между этими деревьями.
7. Покажите, что матрица электрической схемы (рис. 4.5, а) в сокращенном координатном базисе (рис. 5.6) при заданных численных значениях параметров ( в новых обозначениях G2 = G3 = 1;
G4 = G5 =0,5; R1=1; R2=2;n=2) приводится к виду:
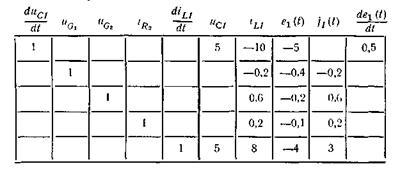
Запишите уравнения переменных состояния и выходные уравнения, если искомыми величинами являются uG2 и iR1.
8. Дайте полное обоснование всех операций алгоритма формирования уравнений переменных состояния в сокращенном координатном базисе (см. рис. 5.5) на основе топологических и компонентных уравнений.
9. Сформируйте уравнения в сокращенном координатном базисе для электрической схемы (см. рис. 5.6) без использования матриц, для чего:
а) составьте уравнения по законам Кирхгофа для несокращающихся сечений и контуров;
б) подставьте в полученные соотношения выражения для переменных из полюсных уравнений;
в) выразите все переменные через продольные величины y-ветвей дерева и поперечные величины z-хорд и подставьте их в уравнения, полученные в предыдущем пункте;
г) запишите полученную систему уравнений в матричной форме и сравните результат с приведенным на рис. 5.6.
10. Покажите, что в графе (рис. 5.4) по условию оптимального разбиения все резисторы должны быть представлены G-дугами. Какие варианты нормальных деревьев, кроме представленного на рис. 5.7, возможны? Какое число координат сокращается?
11. Сформируйте уравнения переменных состояния для схемы (см. рис. 4.8, а) с помощью сокращенной системы координат, определяемой нормальным деревом (рис. 5.7), выполнив все процедуры в соответствии с рис. 5.5.
12. Постройте процедуру формирования уравнений в сокращенном координатном базисе для линейных систем как частный случай, приведенный на рис. 5.8, и дополните ее вплоть до получения уравнений переменных состояния и выходных уравнений.
6. Блочные группы как средство описания графов

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
