
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() - обобщенная сила, приложенная к
- обобщенная сила, приложенная к ![]() -й массе;
-й массе;
![]() =1, 2,…,п.
=1, 2,…,п.
Уравнении движения в форме уравнений сил или моментов либо в форме уравнения кинетических энергий имеют вид:
![]() (15)
(15) ![]() (16)
(16)  (17)
(17)
где ![]() — соответственно приведенная масса системы,
— соответственно приведенная масса системы,
линейная скорость и линейное перемещение звена
приведения;
![]() - приведенные значения соответственно сил движущих и сил сопротивления;
- приведенные значения соответственно сил движущих и сил сопротивления;
![]() - ириведеяный момент инерции системы, угловая скорость и угловое перемещение звена приведения;
- ириведеяный момент инерции системы, угловая скорость и угловое перемещение звена приведения;
![]() - приведенные моменты сил движущих и сил сопротивления;
- приведенные моменты сил движущих и сил сопротивления;
![]()
Уравнения Даламбера и уравнения Лагранжа второго рода применяются для описания как жестких систем (без упругих элементов), так и систем с упругими звеньями. Уравнения в форме (15)—(17) используются при описание только жестких систем.
Факторами, ограничивающими применение указанных методов описания, являются:
необходимость приведения и минимизации числа степеней свободы элементов расчетной схемы;
зависимость трудоемкости описания от размерности расчетной схемы;
неформализованный выбор обобщенных координат системы;
невозможность отобразить в уравнениях движения структуру системы.
Рассмотрим граф-аналитические методы описания расчетных схем.
Формальный алгоритм математического описания расчетной схемы граф-аналитическим методом основывается на использовании принципа изоморфизма (взаимнооднозначного соответствия) между исследуемой системой (расчетной схемой) и конечным ориентированным графом, отображающим состав переменных и структуру системы.
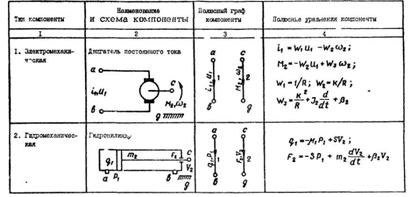
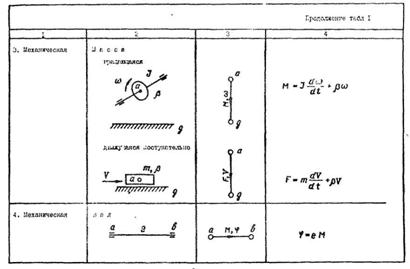
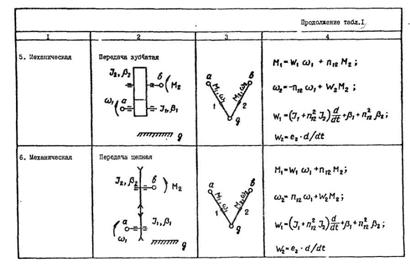
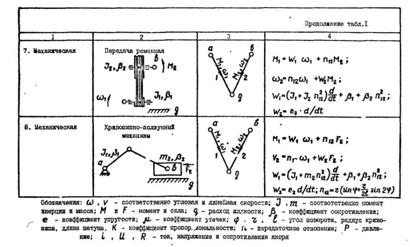
Расчетная cxeмa системы рассматривается как совокупность связанных базовых элементов (компонент), например механической передачи, упругого звена, массы и т. п., имеющих известное математическое описание.
Описание каждой компоненты включает ориентированный полюсный граф, интерпретирующий измерение переменных в точках присоединения (на полюсах) компоненты, и полюсные уравнения, характеризующие функциональную связь между переменными компоненты.
Измерение переменных является единственным способом количественной оценки переменных, характеризующих физические свойства компоненты. Все переменные соответственно способу их измерения условно разделяются на две группы: параллельные (X) и последовательные (Y).
Математическое описание рачетной схемы строится путем объединения полюсных характеристик компонент, на основе уравнений связи. Полюсные графы компонент образуют граф схемы, в котором вершины изображают полюса компонент, a oриентированные дуги - процедуру измерения переменных между полюсами (переменные системы).
На основе постулатов для вершин и контуров графа (обобщенных законов Кирхгофа) записываются уравнения связи - уравнения отсечений и уравнения фундаментальных контуров, которые совместно с полюсными уравнениями компонент составляют систему уравнений, характеризующих динамику исследуемой системы.
Практическая реализация данного метода описания заключается в следующем. Расчетная схема разделяется на ряд базовых компонент с известными полюсными характеристиками. Полюсные характеристики некоторых типов компонент, входящих в состав механических, электро - и гидромеханических систем, приведены в табл. 1.
Таблица 1
Полюсные характеристики компонент механических и электрогидромеханических систем
Следующим шагом является образование графа системы путем объединения полюсных графов компонент и присоединения полюсных графов внешних воздействий (кинематического и силового). Выбирается дерево (лес) графа, представляющее собой подграф, содержащий все вершины графа, но не имеющий контуров. Дерево графа разделяет дуги графа на ветви (относятся к дереву) и хорды (входят в дополнение дерева).
Далее записываются полюсные уравнения компонент:
 (18)
(18)
где ![]() - матрицы коэффициентов полюсных уравнений;
- матрицы коэффициентов полюсных уравнений;
![]() неизвестные параллельные и последовательные
неизвестные параллельные и последовательные
переменные, соответствующие ветвям графа
схемы;
![]() неизвестные параллельные и последо вательные
неизвестные параллельные и последо вательные
переменнные, соответстаующие хордам графа.
Следующей процедурой является составление уравнений:
фундаментальных контуров
 (19)
(19)
где![]()
![]() - подматрицы матрицы коэффициентов, состоящие из чисел
- подматрицы матрицы коэффициентов, состоящие из чисел ![]()
![]() - заданные параллельные переменные, соответствующие ветвям графа;
- заданные параллельные переменные, соответствующие ветвям графа;
уравнений отсечений
 (20)
(20)
где![]()
![]() - подматрицы матрицы коэффициентов, состоящие из чисел 1,-1 и 0;
- подматрицы матрицы коэффициентов, состоящие из чисел 1,-1 и 0;
![]() - заданные последовательные переменные, соответствующие хордам графа.
- заданные последовательные переменные, соответствующие хордам графа.
На завершающем этапе уравнения (19) и (20) подставляются в полюсные уравнения компонент (18), после чего производятся матричные преобразования. Полученные в результате уравнения динамики системы имеют вид
 (21)
(21)
где
Уравнения типа (21) представляют собой системы обыкновенных дифференциальных или алгебро-дифференциальных уравнений с числом уравнений, равным числу полюсных уравнений компонент, и могут быть получены как с использованием матричных операций (матрично-топологический метод), так и без них (топологический метод).
При топологическом методе вывод уравнений системы заключается в подстановке в пслюсные уравнения компонент (18) вместо переменныхих  значений, полученных на основе выражений:
значений, полученных на основе выражений:
![]() (22)
(22) ![]() (23)
(23)
Узловые уравнения (22) и контурные уравнения (23) являются частью соответственно уравнений (20) и (19) и составляются на основе отсечений и фундаментальных контуров графа системы. Алгоритм описания расчетных схем топологическим методом в виде блок-схемы изображен на рис. 4.
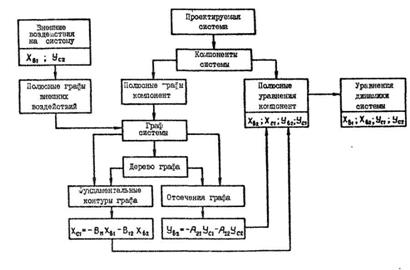
Рис.4
Топологический метод универсален и позволяет описывать как линейные, так и нелинейные системы с любым числом компонент, Матрично-топологический метод эффективен при описании только линейных систем с небольшим числом компонент.
Оба метода формальны, инвариантны относительно размерности систем и физической природы компонент и позволяют учитывать параметры систем и их структуру в явном виде.
Для осуществления математического описания расчетных схем с большим числом компонент разной физической природы применяется блочный метод описания.
Процесс описания сложной системы блочным методом состоит из следующих операций:
разделения сложной системы на блоки;
составления уравнений блоков;
преобразования уравнений блоков в полюсные уравнения блоков;
вывода итоговых уравнений сложной системы.
На первом этапе расчетная схема системы разделяется на отдельные блоки, состоящие из нескольких компонент.
Для каждого блока топологическим или матрично-топологическим методом составляются уравнения движения типа (21). Уравнения (21) путем подстановки в яих вместо переменных![]() внешних (заданных) последовательных переменных ветвей
внешних (заданных) последовательных переменных ветвей ![]() и параллельных переменных хорд
и параллельных переменных хорд![]() преобразуются в полюсные уравнения блока:
преобразуются в полюсные уравнения блока:
 (24)
(24)
где ![]() - подматрицы матрицы коэффициентов полюсных уравнений блока.
- подматрицы матрицы коэффициентов полюсных уравнений блока.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 |
