

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Кроме указанных возможностей управления характеристиками, влияющими на качество работы исполнительных процедур, существуют управляющие параметры, изменяющие режим вычислений, например параметр DAMP для изменения режима демпфирования колебаний переменных на итерациях по Ньютону, параметр IVZ для изменения частоты переоценки матрицы Якоби, параметр TAYDC для изменения режима расчета статики и перехода к методу продолжения решения по параметру и др.
Таким образом, существующие возможности управления характеристиками основных исполнительных процедур обеспечивают достаточно полный комплекс мер, повышающий надежность подсистемы консультационного анализа в целом. Как показывает опыт, наличие подобных средств влияния консультанта на исполнительные подпрограммы увеличивает степень их универсальности, что существенно сказывается на эффективности процедуры моделирования при работе с широким ассортиментом нелинейных консультируемых проблем. В то же время, поскольку выбор отдельных управляющих параметров лежит полностью или частично на консультанте-пользователе САК, то степень его заинтересованности в решении поставленной задачи, личный опыт и знание возможностей моделирующего консультационного комплекса имеют существенное значение.
Интегрирование уравнений распределенных консультируемых проблем. Рассмотренные выше методы численного интегрирования могут использоваться и при нахождениии характеристик некоторых консультируемых проблем, отдельные компоненты которых описываются уравнениями в частных производных.
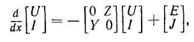
Например, если консультируемая проблема предствалена длинной активной линией передачи (рис. 8.4, а), справедливы следующие пространственно-временные соотношения:
 (8.92)
(8.92)
 (8.93)
(8.93)
где R, G, L, С, е, j — параметры выделенной секции такой линии;
х0 < х < хп.
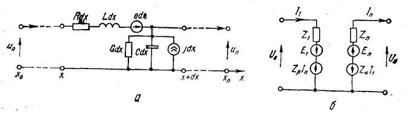
Рис. 8.4. Схема замещения длинной линии: а — многосекционная,
б — эквивалентным четырехполюсником
Используя формулу неявного метода интегрирования (8.60) для алгебраизации частных производных по времени, получаем
 (8.94)
(8.94)
 (8.95)
(8.95)
На основании исходных выражений (8.92) и (8.93) с учетом соотношений (8.94) и (8.95) находим преобразованные уравнения длинной линии, справедливые для каждого данного момента времени tk+1:
 (8.96)
(8.96)
где
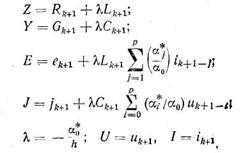
Параметры Z, Y, E, J, вошедшие в уравнение (8.96), примут другие значения, если вместо неявного метода (8.60) использовать метод (8.73) или (8.74).
Полученные уравнения (8.96) затем интегрируются по пространственной переменной х. Если линия линейная и однородная, то параметры Z и Y не зависят от индекса временного шага k и общее решение можно получить в аналитическом виде. Если линия нелинейна и неоднородна, то для решения уравнения (8.96) используются численные методы. Например, применяя аппроксимирующие разности первого порядка, находим
 (8.97)
(8.97)
 (8.98)
(8.98)
где п — общее число дискретных точек (секций), выделяемых в линии.
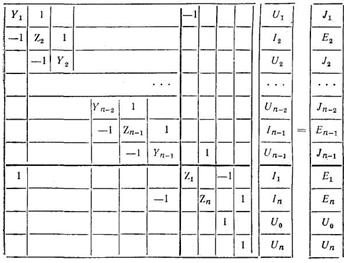
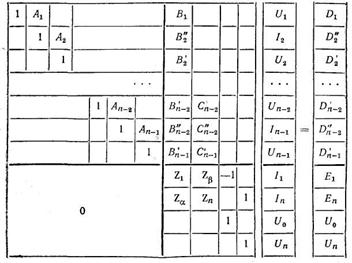
На основании выражений (8.96)—(8.98) можно записать следующую систему 2n — 1 преобразованных уравнений длинной линии:
 (8.99)
(8.99)
Структура уравнений (8.99) такова, что внутренние переменные длинной линии легко исключаются из них, в результате чего они сводятся к уравнениям эквивалентного четырехполюсники (риc. 8.4, б). Параметры Zα и Zβ такого четырехполюсника находятся в процессе гауссова исключения и приведения системы уравнений вида
 (8.100)
(8.100)
к системе с верхней и нулевой нижней левыми субматрицами
 (8.101)
(8.101)
В случае нелинейной и неоднородной длинной линии параметры Zβ, Zα, Z1, Zn оцениваются для каждого временного шага.
Для консультируемых проблем, распределенных в двух или трех направлениях, вместо уравнений (8.97) и (8.98) используются более сложные разностные аппроксимации, учитывающие близлежащие выделяемые точки консультируемой проблемы, лежащие на регулярной или нерегулярной сетке. Для решения уравнений с частными производными широко применяются также методы коллакаций, Галеркина, Ритца и конечного элемента.
8.5. Методы анализа повышенной эффективности
Диакоптические методы. Диакоптические методы основаны на фрагментации модели сложной консультируемой проблемы, организации раздельных вычислений по фрагментам с периодическим согласованием результатов, получаемых в отдельных фрагментах. Диакоптические методы применяют для решения систем различных уравнений совместно с традиционными численными методами.
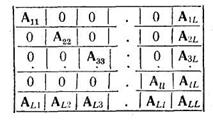
Для решения систем линейных алгебраических уравнений (ЛАУ) AV=B применяют диакоптический вариант метода Гаусса, основанный на приведении матрицы коэффициентов к блочно-диагональному виду с окаймлением (БДО). При анализе схем этот вариант называют методом подсхем. В методе подсхем исходную схему разбивают на фрагменты (подсхемы). Фазовые переменные (например, узловые потенциалы) делят на внутренние переменные фрагментов и граничные переменные. Вектор фазовых переменных
V = (V1,V2...Vl,VL),
где Vi — подвектор внутренних переменных i-гo фрагмента; l — число фрагментов; VL — подвектор граничных переменных (L =l+l). Матрица коэффициентов имеет структуру БДО
Прямой ход метода Гаусса состоит из L этапов. На i-м этапе исключаются переменные Vi, при этом пересчет коэффициентов по формуле Гаусса производится только в подсистеме уравнений
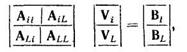
где Вi и BL — подвекторы правых частей соответствующих уравнений.
Следовательно, решение одной сложной задачи заменяется решением L задач меньшей размерности, что при α>1 в формуле (8.43) дает снижение Тм. Кроме того, при нехватке оперативной памяти в методе подсхем можно минимизировать число обменов информацией между оперативной и внешней памятью.
Для решения систем нелинейных конечных уравнений используют диакоптический вариант метода Ньютона с контролем сходимости итерационного процесса отдельно по выделенным фрагментам. Выполнение условий сходимости в i-м фрагменте является основанием для прекращения вычислений по уравнениям этого фрагмента. Очевидно, что раздельное интегрирование означает и раздельное решение подсистем ЛАУ, относящихся к отдельным фрагментам.
Раздельное по фрагментам интегрирование дифференциальных уравнений довольно просто организуется лишь при использовании явных методов. Покажем это на примере решения методом Эйлера системы ОДУ, представленной в нормальной форме Коши и разделенной на две подсистемы:

где V и Z — подвекторы фазовых переменных, относящиеся к разным фрагментам (граничные переменные предполагаются включенными в один из подвекторов V или Z). Обозначая величины шагов в подсистемах h и Н и применяя формулу Эйлера для момента времени tk

имеем

откуда вычисляем V(tk+h) и Z(tk+H). Пусть h<H. Для выполнения очередного шага по переменным V нужно вычислить Z(tk+h), что осуществляют с помощью интерполяционного полинома степени р, построенного по p+1 последним рассчитанным точкам кривой Z(t). Здесь р — порядок метода интегрирования. При применении метода Эйлера р=1, и значение Z(tk+h) вычисляют на основе линейной интерполяции по известным точкам Z(tk) и Z(tk+h). После осуществления шага по переменным V шаги повторяют — очередной шаг делают по переменным V или Z в зависимости от того, в каком фрагменте моделируемое время имеет меньшее значение.
Интегрирование подсистем ОДУ с оптимальным для каждого фрагмента значением шага может привести к сущестнешюй экономии затрат машинного времени, особенно при применении неявных методов интегрирования. Однако организация неявного пофрагментного интегрирования оказывается более сложной, чем явного. Примеры методов пофрагментного неявного интегрирования — методы однонаправленных моделей и релаксации формы сигнала (РФС).
Методы однонаправленных моделей и релаксации формы сигнала. Модели многих сложных элементов консультируемых проблем являются однонаправленными. В них могут быть выделены входные и выходные фазовые переменные, причем выходные не влияют на входные. Примерами однонаправленных моделей служат большинство моделей консультируемых проблем, элементы которых представлены логическими элементами.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
