

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пусть на k-й итерации интервал изменения переменной х сократился до [аk, bk], а≤ аk ≤ bk ≤b. Тогда для вычисления следующего интервала [аk+1, bk+1] выбирают точки х k и x'k (рис. 9.5) по формулам

где Фk — числа Фибоначчи, определяемые с помощью рекуррентных соотношений

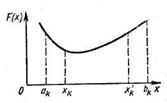
Рис. 9.5. Расположение интервалов поиска экстремума методом чисел Фибоначчи
Если F(xk) <F(x'k), то в качестве следующего интервала выбирают
[ak+1, bk+1]=[ak, x'k), если F(xk)>F(x'k), то выбирают [ak+1, b k+1] = [xk, bk], если F(xk) =F(x'k), то может быть выбран любой из интервалов.
Последние точки задаются формулами

где ε — произвольно малое число, вводимое на последней итерации. Следует отметить, что длина последнего интервала неопределенности определяется как
 (9.44)
(9.44)
Выражение (9.44) позволяет определить количество вычислений критерия оптимальности исходя из требуемой точности поиска.
В методе золотого сечения сохраняется постоянным отношение длин двух последовательных интервалов неопределенности:
τ = Lk/ Lk+1 = 1,61803...
По результатам двух экспериментов устанавливают, какую область неопределенности оставить для дальнейших исследований. Процесс поиска оптимума можно продолжать сколь угодно долго. После N испытаний длина интервала неопределенности составляет LN=l/τ N-1.
Отметим, что метод золотого сечения требует сравнительно небольшого объема памяти ЭВМ и прост в реализации.
Метод полиномиальной аппроксимации заключается в определении полинома, аппроксимирующего функцию F(X) (чаще всего — квадратичного полинома), и поиске его минимума.
В конкретных задачах оптимального консультирования довольно часто зависимость критерия оптимальности F от параметров консультирования X получается слишком сложной. В этих случаях вместо вышеизложенных регулярных методов оптимизации рекомендуется использовать методы случайного поиска. В этих методах направление поиска Рk, выбирают случайно, например, равновероятно в пределах гиперсферы с центром в точке Хk-1. Существует огромное число алгоритмов случайного поиска. Следует отметить, что регулярные алгоритмы поиска являются частным (а точнее, вырожденным) случаем стохастических алгоритмов.
Методы условной оптимизации. Задачи условной оптимизации, заключающиеся в минимизации некоторого критерия оптимальности с ограничениями на область существования переменных консультирования, относятся к классу задач математического программирования.
Одним из наиболее простых и широко известных методов решения задачи математического программирования является метод штрафных функций. Основная идея метода состоит в приближенном сведении задачи минимизации функции F(X) при ограничениях Qi(X)≤0, i==l, 2,…, n, к задаче минимизации функции
Ф(X,t) = F(X) + tR(X) (9.45)
без ограничений. При этом вспомогательную функцию Ф(Х, t) подбирают так, чтобы она совпадала с функцией F(X) внутри допустимой области S и быстро возрастала вне ее.
В выражении (9.45) R(X) — дифференцируемая функция штрафа, удовлетворяет следующим условиям: R(X) =0, если X![]() S, и R(Х)>0, если хотя бы для одного k будет Qk,(X)>0, (k =1,2,…, n), t — некоторое положительное число — коэффициент штрафа.
S, и R(Х)>0, если хотя бы для одного k будет Qk,(X)>0, (k =1,2,…, n), t — некоторое положительное число — коэффициент штрафа.
Примерами функций R(X) могут служить выражения

или

Рис. 9.6 иллюстрируется метод штрафных функций в одномерном случае.
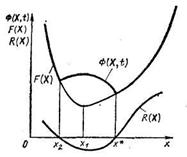
Рис. 9.6. Метод штрафных функций
Допустимая область S определяется ограничением R(Х)≥0, в этой области F(X) и Ф(Х, t) совпадают. В области, где R(Х)<0, функция Ф(Х, t) резко возрастает. На рисунке X1 и X* — точки безусловного и условного минимумов.
В задачах условной оптимизации, в которых ограничения заданы только в виде неравенств, возможно построение обобщенного критерия оптимальности с помощью барьерных функций. Значения, принимаемые барьерной функцией, неограниченно возрастают при приближении к границе допустимой области.
Примером барьерной функции является
Эта функция существует только внутри допустимой области S. Вне области S и на ее границе функция R(X) не определена, а при приближении к границе области S она неограниченно возрастает.
Исходя из организации поиска условного оптимума иногда метод штрафных функций называют методом внешней точки, а метод барьерных функции — методом внутренней точки.
Таким образом, задачу нелинейного программирования удается свести к задаче или последовательности задач безусловной минимизации.
9.5. Задачи формирования рекомендаций по оптимизации допусков и консультационных требований
Качество формируемых рекомендаций по решению задач консультируемой проблемы в значительной мере определяется характером постановки консультационной задачи параметрического синтеза, реализуемой при консультировании, т. е. тем, насколько сформулированные целевая функция и ограничения отражают объективно существующие требования к свойствам КП. При формализации КЗ такие требования выражаются в виде условий функционирования КП. Условие функционирования КП— это требуемое соотношение между выходным параметром уj, значения которого зависят от принимаемых сформированных рекомендаций, и предельно допустимым значением — нормой yj(0). Величину yj(0) будем называть также консультационным требованием на параметр yj. Условия функционирования КП могут иметь одну из следующих форм:
![]() (9.46а)
(9.46а)
![]() (9.46б)
(9.46б)
![]() (9.46в)
(9.46в)
Формы (9.46б) и (9.46в) могут быть сведены к форме (9.46а), поэтому в дальнейшем будем считать, что все условия функционирования КП в КЗ имеют вид (9.46а).
Область в пространстве ХП управляемых параметров, в которой все условия функционирования КП, а заданные прямые ограничения на управляемые параметры xi вида
![]() (9.46г)
(9.46г)
удовлетворяются, будем называть областью функционирования КП Z0.
Задача формирования рекомендаций по оптимизации допусков функционирования КП сводится к определению размеров допусковой области Zд и ее расположения в пространстве ХП. Цель оптимизации допусков — максимизация размеров области Zд при выполнении ограничений на степень несовпадения областей Z0 и Zд.
Решение задачи оптимизации допусков выполняется в два этапа: на первом ищут какую-либо точку Xэ![]() Z0, называемую опорной; на втором определяют оптимальную допусковую область.
Z0, называемую опорной; на втором определяют оптимальную допусковую область.
На первом этапе для определения опорной точки целесообразно использовать постановку задачи оптимизации параметров, известную под названием максиминной постановки. Последняя приводит к получению опорной точки внутри области Z0 на достаточном удалении от границ, что удобно для реализации алгоритмов второго этапа.
При максиминной постановке вводится количественная оценка sj степени выполнения j-го условия функционирования КП. Каждая из оценок sj может носить детерминированный или статистический характер. При детерминированном подходе используют формулу

при статистическом — формулу

где Mj — оценка математического ожидания; δj — оценка рассеяния параметра уj.
В частности, величина δj может рассматриваться как некоторый весовой коэффициент, указание его физического смысла упрощает правильное задание его численного значения без трудоемких статистических расчетов.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
