

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
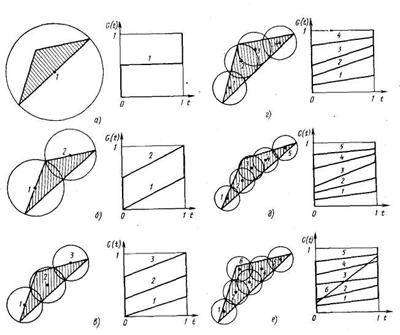
Рис. 10.52. Типовые наборы способов учета неопределенности при линейной аппроксимации порождающей функции:
a) т = 1; б) т = 2; в) т = 3; г) m = 4; д) т = 5; е) т = 6
Пусть п = 2, т. е. отрезок [0, 1 ] оси разбит на три равные части. В этом случае выражение (10.161) примет вид:
f (х, у) = К (0, 0, х1 у1) + К (х1, у1, х2, у2) + К(х2, у2, 1, 1).

Рис. 10.53. Погрешность представления множества допустимых способов учета неопределенности типовыми наборами (при аппроксимации порождающих функций n = 1, 2)
Линии уровня этой функции на плоскости (х1, х2) при фиксированных значениях у1, у2 показаны на рис. 10.54 — они могут быть получены одна из другой преобразованием подобия с центром в точке (у1, у2).

Рис. 10.54. Линии уровня функции локальной эффективности при п=2
Внешнее множество X в этом случае представляет собой тот же треугольник, показанный на рис. 10.49. Множество стратегий совпадает с ним, и исходную задачу можно представить как задачу «покрытия» X заданным числом фигур, изображенных на рис. 10.54, при их минимальных размерах. Результаты решения этой задачи, полученные геометрическим путем, для числа элементов стратегии от 1 до 6 показаны на рис. 10.53 и 10.55.
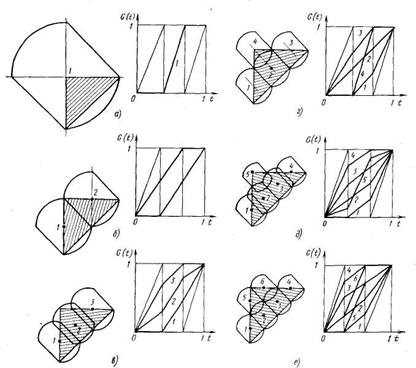
Рис. 10.55. Типовые наборы способов учета неопределенности при аппроксимации порождающих функций 3-звенными ломаными:
а) т = 1; б) т = 2; в) т = 3; г) т = 4; д) т = 5; е) т = 6
Приведенные результаты позволяют приближенно построить характеристику возможностей типизации учета неопределенности l (т) (рис. 10.53) и получить начальные приближения для эффективного использования общего алгоритма оптимизации МСК. Результаты такой типизации показаны на рис. 10.56 и на рис. 10.44.
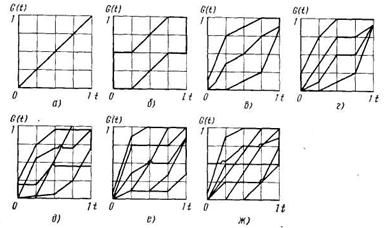
Рис. 10.56. Типовые наборы способов учета неопределенности при апроксимаци» порождающих функции 4-звенными ломаными:
а) т = 1; б) т =. 2; в) т = 3; г) т = 4; д) т = 5; е) т = 6; ж) т = 7
Заметим, что линия р=5 почти совпадает с линией р=3. Это объясняется тем, что при проведении расчетов полагалось, что в точках t = 0 и t = 1 порождающие функции могут принимать лишь соответственно значения 0 и 1, и тем самым при оптимизации типовых функций учета неопределенности опускались два «угла» квадрата
[0, 1] × [0, 1] площадью 0,1 каждый. Наиболее точными мы считаем результаты, полученные для р = 4. В этом случае, как и при п = 1, допускалось, что при t = 0, t = 1 порождающие функции могут принимать любые значения от 0 до 1, т. е. отрезок [0, 1 ] оси t делился как бы на 9 частей, из которых две крайние стягивались в точки. Линия р = 4 (рис. 10.44) лежит ниже линии р = 5 именно за счет того, что оптимизация типовых функций учета неопределенности производилась для полного внешнего множества X'. Решение для п = 4 и было принято как окончательное, аппроксимация которого приведена в табл. 10.3 и на рис. 10.45.
10.2.5. Расчет н-обобщенных потерь
10.2.5.1. Сотношения для расчета н-обобщенных потерь
Как указано в п.10.2.2 [см. соотношения (10.129), (10.130)] и доказано в п. 10.2.4.3, при X ![]() Rn
Rn
G(FA(X))= G(f(x, A))dx, (10.163)
или
FA(X) = G-1( G(f(x, A))dx). (10.164)
Например, если в задаче формирования рекомендаций имеются независимые неопределенные параметры xi, i = 1, ..., п и ai≤xi ≤ bi,
i = 1, ..., n, то
G(Fy(X))= .
.
Формулы (10.163), (10.164) могут быть значительно упрощены, в частности, освобождены от многомерных интегралов. Преобразуем, например, формулу (10.163). Для этого разобьем отрезок [т, М]:
т = f(x, A); M = f(x, A)
на N частей точками μi, μi+1 ≥ μi, где i = 0, ..., N. При этом обозначим
si = dx.
Тогда
Если ξi ![]() [0, 1 ] — некоторая средняя точка, то
[0, 1 ] — некоторая средняя точка, то
fi(A) = μi-1 + ξi(μi - μi-1)
и
G (FA (X)) =![]() G [μi-1 + ξi(μi - μi-1)]
G [μi-1 + ξi(μi - μi-1)] ![]() ,
,
Можно представить теперь вычисление FA(x) как задачу формирования рекомендаций с обобщенными потерями:
F(ξ,А) = G-1{ ![]() G [μi-1 + ξi(μi - μi-1)]
G [μi-1 + ξi(μi - μi-1)] ![]() }, ξ = (ξ 1;..., ξN)
}, ξ = (ξ 1;..., ξN)
в условиях неопределенности значений ξi , i = 1, ..., N, используя формулу (10.163). При этом необходимо воспользоваться тем же способом учета неопределенности, что и в исходной задаче, т. е. той же функцией G (t). Тогда
Здесь Ωξ = 1 — мера N-мерного куба, 0 ≤ ξi ≤ 1, где i — 1, ..., N. Если N = 1, т. е. распределение значений функции локальной эффективности на множества X не учитывается, то
G (FA (X)) = G(t)dt, (10.165)
G(t)dt, (10.165)
или
G(FA(X))= ,
где
I(t)= ![]() G(t)dt
G(t)dt
Метод расчета н-обобщенных потерь по формуле (10.165) будем называть Мm-методом.
Представим выражения (10.129), (10.130) в несколько иной форме. Для этого введем в рассмотрение приведенную функцию обобщенных потерь f*(х, А) и приведенные н-обобщенные потери F*, которые определим соотношениями:
f*(х, A)=G(f(x, A)), F*A(X) = G(FA(X)).
Тогда соотношения (10.129), (10.130) примут вид
F*A(X) = ![]() f*(хi , A) ; (10.166)
f*(хi , A) ; (10.166)
F*A(X) = f*(x, A)dx. (10.167)
В этом случае приведенные н-обобщенные потери рассчитывают как среднее значение приведенных обобщенных потерь по множеству неопределенности X, причем правило перерасчета обобщенных и
н-обобщенных потерь в приведенные определяется способом учета неопределенности [порождающей функцией G (t)].
Агрегированный учет неопределенности предполагает необходимость вычисления многомерных интегралов по множеству неопределенности X от приведенных обобщенных потерь, которые рассчитываются для фиксированных порождающих функций из типового набора. Для вычисления таких интегралов на ЭВМ имеются соответствующие стандартные программы. Однако, когда различные виды неопределенности воздействуют на обобщенные потери независимо (т. е. множество X можно представить как прямое произведение множества значений неопределенных факторов различного вида), целесообразно от одновременного учета всех видов неопределенности перейти к их последовательному учету. Действительно, пусть Ω, Ω 1, Ω 2, ..., Ω K — мера множества X, X1, Х2, ..., Хк, соответственно, при X = Х1 × Х2 × ... × Хк, а f* (х) ≡f* (х1, х2, х3, ..., хк) (х ![]() X; xi
X; xi ![]() Xi, i = 1, ..., к) — непрерывная на X функция приведенных обобщенных потерь.
Xi, i = 1, ..., к) — непрерывная на X функция приведенных обобщенных потерь.
Тогда
В соответствии с выражением (10.167):
f* (х) ≡f* (х1, х2, х3, ..., хк) dxK ≡ f* (x1, ... ,хk-1),
где f* (x1, ... ,хk-1) — приведенные н-обобщенные потери с учетом множества неопределенности Хк. Далее,
f* (x1, ... ,хk-1) dxk-1 ≡ f* (х1, ..., хк-2).
где f* (х1, ..., хк-2).— приведенные н-обобщенные потери с учетом уже двух множеств неопределенности Хк и Хк-1 и т. д.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
