

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Если с погрешностью задана матрица уравнений (A+δA), то вызываемая погрешность при определении вектора переменных - оценивается в соответствии с выражением
![]() (8.24)
(8.24)
При решении систем уравнений, характеризующихся большим разбросом собственных значений λi, могут возникать существенные вычислительные затруднения.
Пример 2. Рассмотрим характер вычислительных затруднений на простой системе линейных уравнений второго порядка
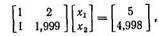
для которой

и степень обусловленности (A) =104.
Если вектор правой части изменить на величину δb= [0,0,001]t , т. е. выбрать ||δb||/||b|| = 1,4 • 10-4, то в соответствии с выражением (8.23). можно оценить относительную погрешность

В реалистичности этой оценки можно убедиться, если решить непосредственно модифицированную систему уравнений
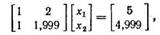
для которой точное решение х=[3, 2]t в отличие от точного решения исходной системы х0 = [1, 2]t .
Таким образом, в действительности δx = [2, —1]t, ||δx||/||x|| = 1. Определитель решаемой системы уравнений мал (10-3), но это не означает, что степень обусловленности матрицы всегда плохая. Можно привести пример матрицы 10-го порядка, для которой
|λ1|=|λ2|=...=|λ9|=0,1 и λ10=1, а определитель равен ± 10-9, но соnd(A) = 10.
Консультанту, моделирующему консультируемую проблему на САК, следует учитывать изложенное выше и стремиться по возможности к снижению величины cond(А) то ли правильным выбором модели из имеющихся вариантов, существенно отличающихся этой величиной, то ли использованием процедуры, аналогичной методу диагональной модификации, то ли согласованным выбором параметров компонентов и округлением их величин.
При частотном анализе линейной консультируемой проблемы уравнение (8.11) с учетом операторных компонентных выражений преобразуется к виду
(ReA + jImA) (Rex + jImx) = Reb + jImb,
в результате чего решается система уравнений удвоенной размерности
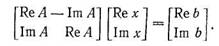 (8.25)
(8.25)
При этом, если на входе консультируемой проблемы синусоидальный источник единичной амплитуды и нулевой фазы, то значения действительной и мнимой составляющих передаточной характеристики Т на частоте ωk получаем как соответственно действительную и мнимую части реакции схемы xk:

откуда легко определяются значения амплитудно-частотной (АЧХ) и фазочастотной (ФЧХ) характеристик консультируемой проблемы соответственно:
 (8.26)
(8.26)
![]() (8.27)
(8.27)
Таким образом, решив уравнения консультируемой проблемы (8.25) на частоте ω=ωk, определим значение на этой частоте всех интересующих консультанта передаточных функций от одного входа к произвольному числу выходов. Если необходимо найти передаточные функции от разных входов, то для каждого из входов необходимо повторить прямой и обратный ход решения уравнений консультируемой проблемы (8.26) с соответствующей правой частью.
Кусочно-линейные методы. Количество последовательных решений линейной системы уравнений (8.6), необходимое для решения нелинейной системы (8.2) или (8.3), можно снизить, если применить кусочно-линейные методы и изменить характер используемой линеаризации компонентных уравнений (6.41).
В результате кусочно-линейной аппроксимации компонентных уравнений с сравнительно небольшим числом участков аппроксимации уравнения нелинейной модели консультируемой проблемы f(x) = у, где у — вектор задающих сил, преобразуются в совокупность линеаризованных алгебраических уравнений вида
 (8.28)
(8.28)
где l — число выпуклых областей разбиения пространства переменных модели консультируемой проблемы, границы которых в виде гиперплоскостей определяются точками излома аппроксимированных характеристик отдельных нелинейных компонентов.
Вследствие непрерывности оператора преобразования непрерывного пространства в линейно-секционированное предполагается, что матрицы J(m) и J(m-1) отличаются только одним элементом, поэтому
 (8.29)
(8.29)
где ![]() — вектор, нормальный к границе областей.
— вектор, нормальный к границе областей.
Применяя соотношение (8.29), используют метод припасовывания для решения линейных систем уравнений двух смежных областей, в соответствии с которым треугольные матрицы L(m) и U(m), определяемые матрицей J(m) = L(m)U(m), находят непосредственно по известным матрицам L(m-1) и U(m-1), соответствующим предыдущей области решения с матрицей J(m-1) = L(m-1)U(m-1).
Задача нахождения х*, удовлетворяющего уравнению (8.28) при заданном у*, при использовании кусочно-линейных методов формулируется как задача проведения траектории движения изображающей точки в секционированном пространстве, начиная с x(0). Причем в области значений функции f (подпространстве у) траектория L(у) имеет вид прямой линии, соединяющей точки у(0) и у*, а в области значений аргументов (подпространство х) эта траектория имеет форму кусочно-линейной кривой L(x), точки излома которой находятся на граничных гиперплоскостях. При выборе начального значения x(0) исходят из условий обеспечения сходимости решения, для чего в качестве начальной выбирают область, в которой принципиально может находиться только одно решение, и вычисляют

Далее строят часть кривой решения L(x), расположенной в начальной области R0,
 (8.30)
(8.30)
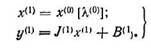
по двум точкам
![]()
при этом кривая решения L(y) имеет вид
![]() (8.31)
(8.31)
В выражениях (8.27) и (8.28) коэффициент λ изменяется в диапазоне 0 ≤ λ≤λ (0), где значение λ(0) < 1 определяется из условия, что х(0)[λ(0)] лежит на граничной гиперплоскости между областями R(0) и R(1) и не попадает в точку пересечения нескольких областей, т. е. из условий
Далее аналогичным образом строятся части «кривых решения» L(x) и L (у) в области R(1):
 (8.32)
(8.32)
и также оценивается величина λ, для этой области и т. д.
Процесс вычислений (перебора областей) продолжается до тех пор, пока λ в одной из них, например в s-й области, не достигнет значений
λ = 1. Тогда

Если матрицы J(т) и J(т-1) для соседних областей имеют одинаковые знаки, то при прохождении границы областей коэффициент λ > 0, что быстро ведет к сходимости вычислений. Если указанные матрицы имеют различные знаки, то граница областей пересекается при λ < 0 и решение y(т) уходит от у*, что в принципе может привести к образованию циклов в траектории движения L(x).
Следует подчеркнуть, что ускорение процедуры решения нелинейной алгебраической системы уравнений применением кусочно-линейных методов достигается за счет точности самого решения.
Выбор метода решения системы алгебраических уравнений. Решение систем алгебраических уравнений (АУ) имеет место во многих консультационных процедурах и прежде всего в процедурах функционального консультирования. Эффективность решения этих консультационных задач вносит существенный вклад в общую эффективность выполнения консультационных процедур, поэтому необходимо правильно выбрать метод решения системы АУ. Такой выбор приходится осуществлять разработчику пакета прикладных программ (ППП) для подсистем функционального консультирования. Если же пакет выполнен открытым по отношению к численным методам решения систем АУ и, следовательно, содержит ряд модулей, реализующих альтернативные методы, то выбор метода возлагается на консультанта.
На эффективность применения метода оказывают влияние не только особенности самого метода, но и в не меньшей мере особенности решаемой задачи и используемой ЭВМ. Среди наиболее существенных особенностей задач, называемых ниже факторами, отметим размерность п (порядок системы уравнений), число обусловленности Ц и разреженность S матрицы Якоби, а среди особенностей ЭВМ — быстродействие Б, определенное для класса консультационных задач, емкость оперативной памяти и разрядность машинного слова. Разработчик ППП должен ориентироваться на некоторые диапазоны значений этих факторов, характерные для моделей консультируемых проблем в соответствующей предметной области. Эти диапазоны должны быть либо указаны в техническом задании на разработку ППП, либо спрогнозированы самим разработчиком на основе исследования статистических данных об имеющихся или предполагаемых моделях.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
