

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
[G (0,2) + G (0,6) ]/2.
Соответствующие построения проведены на рис. 10.42, откуда видно, что искомая оценка (н-обобщенные потери) составляет при способе учета неопределенности А — 0,4, при способе В — 0,47, при способе С — 0,32.
Таким образом, способ, ранее названный пессимистическим, дает лучшее значение н-обобщенных потерь, чем более оптимистические. Это показывает, что на направление смещения значения н-обобщенных потерь относительно средней оценки влияет не абсолютное значение порождающей функции, а ее кривизна: при вогнутой функции оценка значения неопределенной величины оказывается пессимистической, а при выпуклой — оптимистической.
Итак, множество допустимых способов учета неопределенности S в методе ПРИНН задается совокупностью всех непрерывных строго монотонных функций G(t), графики которых проходят через точки (0; 0) и (1; 1). Важнейшим свойством такого множества является его инвариантность к конкретным условиям задач формирования рекомендаций в условиях неопределенности. Можно сказать, что в виде элементов этого множества (порождающих функций) удается выделить инвариантные компоненты учета неопределенности, в то время как их предметные компоненты, отражающие реальные условия решаемых задач, находят выражение в структуре формул (10.129), (10.130), включающих конкретные обобщенные потери и конкретное множество неопределенностей данной задачи. Достоинством описанного множества S является его наглядность и возможность простой трактовки правила расчета н-обобщенных потерь как осреднения вспомогательных потерь.
Для практического использования множества S, содержащего бесконечное число элементов, требуется заменить это множество его конечным подмножеством Т, причем оптимально, т. е. так, чтобы Т с наибольшей полнотой представляло все множество S. Ввиду инвариантности S, его конечное подмножество Т также будет инвариантно, что позволяет назвать его типовым набором способов учета неопределенности. Это понятие является одним из центральных в методе ПРИНН.
Для пояснения основной идеи формирования типового набора способов учета неопределенности проведем аналогию между рассматриваемой проблемой и исследованием некоторой функции R (z) на множестве Z — отрезке числовой оси. Предположим, что консультант не имеет никакой информации о R (z), но может вычислить ее значение в любой точке z![]() Z. Поскольку вычислить значения R(z) во всем бесконечном числе точек Z невозможно, консультант первоначально рассчитает ее значения в некотором конечном числе точек
Z. Поскольку вычислить значения R(z) во всем бесконечном числе точек Z невозможно, консультант первоначально рассчитает ее значения в некотором конечном числе точек
ZK={zi}i=1,2.....к, причем постарается разместить эти точки в Z равномерно, т. е. так, чтобы они наилучшим образом позволяли прозондировать это множество. Типовой набор способов учета неопределенности играет относительно множества S ту же роль, что и ZK относительно Z. Чтобы перенести на него требование равномерности распределения в представляемом им множестве, обратим внимание на следующее свойство ZK. Для любой точки z ![]() Z можно рассчитать ее «расстояние» до ZK как расстояние до ближайшей к z точки ZK:
Z можно рассчитать ее «расстояние» до ZK как расстояние до ближайшей к z точки ZK:
![]() ,
,
где ρ (z, z') — расстояние между точками z, z' ![]() Z. Максимальное из таких расстояний, рассчитанных для всех точек z
Z. Максимальное из таких расстояний, рассчитанных для всех точек z![]() Z, задает погрешность представления множества Z подмножеством ZK:
Z, задает погрешность представления множества Z подмножеством ZK:
,
так как любая точка z ![]() Z может быть заменена одной из точек ZK, отстоящей от нее на расстоянии, не большем
Z может быть заменена одной из точек ZK, отстоящей от нее на расстоянии, не большем ![]() . Очевидно, что из всех подмножеств Z, содержащих данное число точек, ZK обладает наименьшей погрешностью представления Z. Таким образом, для построения типового набора Т, наиболее полно представляющего множество S допустимых способов учета неопределенности, следует ввести в S понятие «расстояния» между двумя любыми способами учета неопределенности, а затем найти набор из заданного числа элементов множества S, обеспечивающий минимум погрешности εт представления S с помощью Т:
. Очевидно, что из всех подмножеств Z, содержащих данное число точек, ZK обладает наименьшей погрешностью представления Z. Таким образом, для построения типового набора Т, наиболее полно представляющего множество S допустимых способов учета неопределенности, следует ввести в S понятие «расстояния» между двумя любыми способами учета неопределенности, а затем найти набор из заданного числа элементов множества S, обеспечивающий минимум погрешности εт представления S с помощью Т:
εт= (10.131)
(10.131)
здесь ![]() ) — расстояние между способами учета неопределенности G, G'
) — расстояние между способами учета неопределенности G, G' ![]() S. За это расстояние естественно принять площадь фигуры, ограниченной графиками функций G (t) и G' (t) (рис. 10.43), т. е.
S. За это расстояние естественно принять площадь фигуры, ограниченной графиками функций G (t) и G' (t) (рис. 10.43), т. е.
 (10.132)
(10.132)
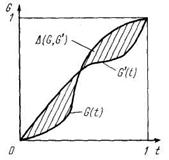
Рис. 10.43. К определению «расстояния» между способами учета неопределенности
После такого задания расстояния ∆(G, G') построение типового набора способов учета неопределенности становится хотя и достаточно сложной, но обычной задачей математического программирования. Ее решение позволило получить погрешность представления множества допустимых способов учета неопределенности типовыми наборами в зависимости от числа таких наборов (m), показанную на рис. 10.44.

Рис. 10.44. Погрешность представления множества допустимых способов учета неопределенности типовыми наборами (при аппроксимации порождающих функций п-звенными ломаными)
При этом можно заметить, что, начиная с 7—8 типовых способов учета неопределенности, кривая погрешности представления ими всех допустимых способов учета неопределенности выходит на участок насыщения, на котором увеличение числа типовых способов лишь незначительно увеличивает точность. Сравнительный анализ представленных результатов позволил рекомендовать в качестве наиболее предпочтительного типовой набор из семи порождающих функций (см. табл. 10.3 и рис. 10.45), которым для удобства пользования присвоены индивидуальные наименования: наихудшая, наилучшая, средняя, осторожная, оптимистическая, релейная, нивелирующая.

Рис. 10.45. Порождающие функции типового набора допустимых способов учета неопределенности (т = 7)
Таблица 10.3
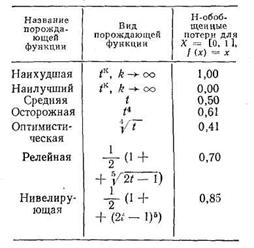
При формировании представленного набора учитывались следующие соображения: отразить все типы линий, полученных в расчетах на ЭВМ, ненамного отклониться от полученной на ЭВМ оптимальной аппроксимации множества и при этом включить в набор три общепринятых подхода к учету неопределенности (средняя, наилучшая, наихудшая), подобрать достаточно простые выражения для уравнений порождающих функций, входящих в набор. Ошибка при замене любой порождающей функции наиболее близкой к ней функцией из предложенного набора не превосходит 14 %
10.2.3. Процедура формирования рекомендации при функционировании консультационного модуля
Рассматривая локальное функционирование консультационного модуля, следует полагать, что изначально заданы три множества: неопределенностей X, допустимых рекомендаций (стратегий) Y, способов учета неопределенностей S (или типовой набор способов учета неопределенности Т), а также функция обобщенных потерь
f(х, у), х X, у Y. Эти компоненты описывают состояние системы «консультируемая проблема и ЛФР» в начале процесса формирования рекомендаций. Если отвлечься от ограничений по времени, отведенному на формирование рекомендаций, мощности используемого КТС, то идеальный консультационный процесс выглядел бы так. Для каждого допустимого способа учета неопределенности s S рассчитывается оптимальная рекомендация s Y. Ее эффективность оценивается при любых способах учета неопределенности z S, поскольку неизвестно, какой из них является наиболее адекватным данной задаче. Так определяется функция Fz (![]() s ),s
s ),s ![]() S, z
S, z ![]() S. Зависимости
S. Зависимости ![]() , Fz (
, Fz (![]() s ), s
s ), s ![]() S, z
S, z ![]() S анализируются ЛФР, ом. Оно окончательно выбирает способ учета неопределенности и порожденную им рекомендацию (формирует рекомендацию) или изменяет исходные компоненты задачи, описывающие как консультируемую проблему (X, Y, f (x, у), так и его самого (S), после чего процесс повторяется.
S анализируются ЛФР, ом. Оно окончательно выбирает способ учета неопределенности и порожденную им рекомендацию (формирует рекомендацию) или изменяет исходные компоненты задачи, описывающие как консультируемую проблему (X, Y, f (x, у), так и его самого (S), после чего процесс повторяется.
Такая процедура обеспечивает полноценный учет влияния неопределенных факторов на формирование рекомендации и в то же время позволяет ЛФР, у пользоваться агрегированной, обобщенной оценкой этого влияния в виде н-обобщенных потерь. Преимущества такого подхода видны на следующем примере. Предположим, что имеет место исключительно благоприятный для формирования рекомендации случай, когда при любых неопределенных факторах

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
