

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Ввиду существования обратной функции t = G-1(у) из соотношения (10.148) можно получить
Ф (и, v) = G-1 [G (и) + G (v) — G (l) ].
Тогда
Ф (v, и).= G-1 [G (v) + G (и) — G (l) ] = Ф (и, v),
т. е. симметричность доказана.
Далее
G (Ф(и, Ф (v, z)))=G (и)+G (Ф (v, z))- G (l)=G(u)+G(v)+G (z)-G(l)-G (l)= = G (v) + G (Ф (и, z)) — G(l) = G (v, Ф (и, z)),
откуда
Ф (и, Ф (v, z)) = Ф (v, Ф (и, z)),
и ассоциативность также доказана.
Получим явное выражение для способа учета неопределенности, порождаемого заданной функцией G(t). Будем рассматривать множество неопределенностей X двух видов: состоящее из конечного числа элементов N и являющееся замкнутой ограниченной областью n-мерного Евклидова пространства.
Пусть X состоит из конечного числа элементов: X = {хi}i=1,2,…,N.
Рассматривая это множество как результат последовательного объединения его элементов и используя соотношение (10.142), имеем
FA(X) = Ф(f(х1 , А), Ф(f(х2 , А), Ф(..., Ф(f(хN-1 , А), f(xN , A)), ...).
Тогда, последовательно используя соотношение (10.145), получим
G(FA(x))=Ф(f(х1 , А), Ф(f(х2 , А), Ф(..., Ф(f(хN-1 , А), f(xN, A)), f(xN, A)), ...) =
= G(f(х1 , А), G(f(х2 , А), Ф(..., Ф(f(хN-1 , А), f(xN , A)),...)-G(l) =
= ..., G(f(x1, A)) + G(f(x2, A)) + ...+G(f(xN , A))-
- (N - 1)G (l) = ![]() G (f(xi,A) ) - (N - 1) G (l).
G (f(xi,A) ) - (N - 1) G (l).
Потребуем, чтобы пара G (t), l, определяющая допустимый способ учета неопределенности, удовлетворяла свойству осреднения. Это накладывает (при f (хi, А) = С = FA (X)) следующее условие:
G (FA (X)) = ![]() G (FA (X)) - (N - 1) G (l),
G (FA (X)) - (N - 1) G (l),
откуда, ввиду строгой монотонности G(t), l=FA(X). Тогда окончательно получим
G (FA (X)) = ![]()
![]() G (f(xi,A) )
G (f(xi,A) )
что позволяет искомый функционал записать в виде
Fa(Х)= G-1 (![]()
![]() G (f(xi,A) )) (10.156)
G (f(xi,A) )) (10.156)
Пусть X —замкнутая ограниченная область Евклидова пространства меры Ω. Разобьем ее на N подобластей одинаковой меры ∆i = ∆= Ω/N,
i = 1, ..., N, выберем в каждой из них произвольную точку xi X. Полученное конечное множество точек XN с известной точностью характеризует все множество X. Значение FN показателя эффективности рекомендации, вычисленной с учетом XN вместо X, удовлетворяет равенству
G(F, N)=![]()
![]() G (f(xi,A) )=
G (f(xi,A) )=![]()
![]() G (f(xi,A) ))
G (f(xi,A) )) ![]() =
=![]()
![]() G (f(xi,A) )∆.
G (f(xi,A) )∆.
С возрастанием N множество XN все полнее характеризует X, так что ввиду непрерывности G (t)
![]() =G(FA(X)),
=G(FA(X)),
а с учетом предыдущего равенства
![]() =
=![]()
![]()
![]() G (xi,A)∆=
G (xi,A)∆= ![]()
![]() G(f(x, A) dx.
G(f(x, A) dx.
Итак, окончательно,
G(FA(X))= ![]()
![]() G(f(x, A)) dx, (10.157)
G(f(x, A)) dx, (10.157)
или
F(X)=G-1(![]()
![]() G(f(x, A)) dx) . (10.158)
G(f(x, A)) dx) . (10.158)
10.2.4.4. Формирование оптимального типового набора способов учета неопределенности
Базируясь на результатах пп. 10.2.4.2 и 10.2.4.3, приступим к формированию типовых наборов способов учета неопределенности, т. е. к замене множества всех допустимых порождающих функций из квадрата 0≤G≤1, 0≤t≤1 конечным (и небольшим) числом типовых порождающих функций. Эту замену будем производить таким образом, чтобы минимизировать ошибку, возникающую при использовании типовой порождающей функции вместо «истинной».
Формирование типовых наборов способов учета неопределенности состоит в размещении оптимальных ε-сетей в множестве допустимых порождающих функций S={G(t), G (0) = 0, G (1) =1}. Число элементов такой сети определяет число способов учета неопределенности, используемых ЛФР при формировании рекомендаций, а величина ε характеризует, насколько полно эти способы отражают все многообразие различных аспектов влияния неопределенности на эффективность рекомендаций.
Построение ε - сетей во множестве S возможно лишь после введения метрики, т. е. понятия «расстояния» ∆ между двумя допустимыми способами учета неопределенности, характеризуемыми порождающими функциями G1 (t) и G2 (t). Эта метрика должна отражать понимание близости между способами учета неопределенности, но в то же время удовлетворять известным аксиомам метрики: тождества, симметрии и треугольника. Ясно, что естественной мерой близости между способами учета неопределенности является различие в оценке эффективности формируемых рекомендаций, вычисленной с их использованием. Учитывая инвариантный характер множества S, правилу определения расстояния в нем также следует придать инвариантный характер. Отсюда следует, что расстояние должно быть определено в рамках некоторой эталонной задачи. В качестве такой задачи примем расчет н-обобщенных потерь при функции локальной эффективности f(х)=х и множестве неопределенностей X = [0, 1 ].
Самым естественным мерилом близости способов учета неопределенности в этой задаче была бы абсолютная величина разности между значениями н-обобщенных потерь, вычисленными по различным способам учета неопределенности:
A (G1; G2) = |G1-1 ( ![]() G1(x)dx) – G2-1 (
G1(x)dx) – G2-1 (![]() G2 (x) dx )| . (10.159)
G2 (x) dx )| . (10.159)
Однако в этом случае не выполняется аксиома тождества (рис. 10.46): расстояние между различными функциями G1(t) и G2(t) может оказаться равным нулю.
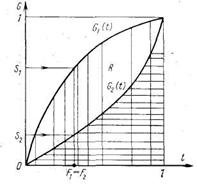
Рис. 10.46. К определению расстояния между допустимыми способами учета неопределенности
Действительно, в выражении (10.158) интегралы определяют площади S1 и S2 криволинейных трапеций, ограниченных графиками функций G1 (t) и G2 (t), а тогда н-обобщенные потери F1 и F2 могут совпадать. Поэтому от рассмотрения разности между «истинными»
н-обобщенными потерями целесообразно перейти к рассмотрению разности «субъективных» н-обобщенных потерь G1 (F1) и G2 (F2), т. е. считать

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
