

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Методы численного интегрирования ОДУ, применяемые в САK.
В практике машинных вычислений наиболее распространены для решения ОДУ методы Гира, Адамса и Рунге — Кутта.
Общий вид формул интегрирования в неявных методах Гира
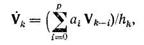
где hk=tk—tk-1 — величина k-го шага интегрирования; аi — коэффициенты, значения которых зависят от порядка р метода и величин порядков последних шагов. Формулы Гира называют также формулами дифференцирования назад (ФДН) по той причине, что в них аппроксимация производных в точке tk производится с помощью значений функций, относящихся к данному и предыдущим моментам времени. Формула Гира при р= 1 совпадает с неявной формулой Эйлера

Часто применяют формулу Гира второго порядка, называемую также формулой Шихмана, которая при h = const имеет вид

Общий вид формул интегрирования в явных методах Адамса при р≥2

в неявных методах Адамса при р≥2

Явная формула Адамса при р=1 называется также явной формулой Эйлера:

явная формула Адамса при р = 2
![]()
Неявный метод Адамса второго порядка точности называют также методом трапеций, ему соответствует формула интегрирования
![]() (8.37)
(8.37)
Рассмотренные методы при р≥2 являются многошаговыми. К одношаговым методам относится метод Рунге — Кутта.
В САК в основном используются неявные методы трапеций и Гира, а в отдельных случаях применяют явный метод Эйлера.
Использование методов возможно, если порождаемый ими вычислительный процесс является устойчивым. Неустойчивость вычислений может возникнуть в связи с катастрофическим ростом погрешностей. Различают локальную погрешность интегрирования, допущенную на данном шаге интегрирования, и погрешность, накопленную к моменту tk за все предыдущие шаги. В неустойчивых методах погрешность решения увеличивается от шага к шагу, что приводит к полному искажению результатов и, возможно, к переполнению разрядной сетки.
Среди рассмотренных методов интегрирования имеются А - устойчивые и ограниченно устойчивые методы. А-устойчивым называют метод, при применении которого к интегрированию системы линейных ОДУ
![]() (8.38)
(8.38)
с начальными условиями V0≠0 погрешность решения стремится к нулю при любом значении постоянного шага h>0 и при tk→∞. Здесь А — постоянная матрица, собственные значения которой имеют отрицательные действительные части. К А-устойчивым относятся неявные методы Гира и Адамса первого и второго порядков точности.
Ограниченно устойчивыми являются остальные из рассмотренных методов, для них характерно сохранение устойчивости вычислений только при выполнении ограничений, накладываемых на значение шага интегрирования. Так, для явного метода Эйлера при h = const в задаче (8.38) условие устойчивости имеет вид неравенства
![]() (8.39)
(8.39)
которое должно выполняться для всех собственных значений λj матрицы А. Для матрицы А с отрицательными вещественными собственными значениями λj условие (8.39) можно представить в виде

Если при этом система уравнений (8.33) есть модель динамической консультируемой проблемы (например, электронной схемы), то величины — 1/λj принято называть постоянными времени τj. Тогда условие устойчивости явного метода Эйлера приводится к виду
![]() (8.40)
(8.40)
где τmin — минимальная постоянная среди постоянных времени моделируемой консультируемой проблемы.
Условия (8.39) или (8.40) устойчивости методов интегрирования в применении к нелинейным системам ОДУ можно рассматривать как приближенные, при этом под λj понимают собственные значения матрицы Якоби ![]()
Так как в нелинейных задачах элементы матрицы Якоби непостоянны, то непостоянны и ее собственные значения. Поэтому априорный выбор значения постоянного шага h, удовлетворяющего условиям устойчивости на всем интервале интегрирования [0, Tкон], оказывается практически невозможным (случай гарантированного выполнения условий устойчивости за счет выбора h τmin неприемлем, так как приводит к чрезмерным затратам машинного времени).
Интегрирование с постоянным шагом нецелесообразно и в А-устойчивых методах, так как h влияет на точность и время решения. Влияние h на точность решения по-разному проявляется на различных участках моделируемого переходного процесса. Поэтому минимизация затрат машинного времени при соблюдении точностных ограничений возможна только в условиях интегрирования с переменным шагом.
Большинство алгоритмов автоматического выбора шага основано на контроле локальных погрешностей интегрирования. Локальные погрешности включают в себя погрешности методические, обусловливаемые приближенностью формул интегрирования, и округления, обусловливаемые представлением чисел с помощью ограниченного количества разрядов. Локальная методическая погрешность многошагового метода порядка р, допущенная на k-м шаге интегрирования, зависит от значения шага hk и оценивается по формуле
![]() (8.41)
(8.41)
где с — коэффициент, зависящий от характера и порядка метода;
||V(р +1)(τ)|| — норма (р+1)-х производных V по t, вычисленных в точке
τ![]() [tk-p, tk]. В алгоритмах интегрирования задаются значением допустимой локальной погрешности δ, а значение шага hk ограничивают сверху
[tk-p, tk]. В алгоритмах интегрирования задаются значением допустимой локальной погрешности δ, а значение шага hk ограничивают сверху
εk < δ, (8.42)
при этом вектор (р+1)-х производных приближенно оценивают с помощью вектора (p+l)-x конечных разностей, вычисленных по уже найденным значениям Vk-i, i=l, 2, ..., (p+2). Однако выполнение условия (8.42) с большим запасом приводит к заниженным значениям hk и увеличивает Tм. Поэтому наряду с (8.42) вводят также ограничение на допущенную погрешность εk снизу и значение шага выбирают автоматически, например по следующему правилу:
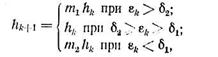
где m1<1; m2>l; δ2/δ1 = 2. (Значения т1, т2, δ2 выбирают, исходя из имеющегося опыта вычислений по данному алгоритму.)
Для того чтобы сделать несущественным влияние погрешностей округления, предусматривают в соответствующих частях алгоритма вычисления с удвоенным числом разрядов, а также не допускают снижения значения шага ниже некоторого минимального уровня hmin.
Сравнение методов и обоснование их выбора для конкретных задач автоматизированного консультирования.
Эффективность метода численного интегрирования оценивается его влиянием на экономичность и точность вычислений.
Качественно характер влияния значения шага на погрешность интегрирования для различных методов можно представить с помощью графиков, изображенных на рис. 8.1.
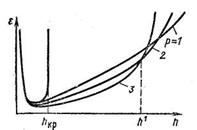
Рис. 8.1. Зависимость погрешности интегрирования от величины шага и порядка метода
В области малых h < hmin значительны погрешности округления. В явных методах наблюдается резкий рост погрешностей при h > hкр, где hкр — максимально допустимая по условиям устойчивости величина шага интегрирования. С ростом порядка метода снижаются погрешности интегрирования, но только при умеренных значениях h<h'. Поскольку величина h' зависит не только от порядков сравниваемых методов, но и от особенностей переходного процесса, что подтверждается формулой (8.41), то заранее определить, метод какого порядка точности даст оптимальный компромисс между показателями точности и экономичности, затруднительно. В связи с этим в программах анализа ряда консультируемых проблем (например, электронных схем) распространен метод ФДН, основанный на автоматическом выборе не только значения шага, но и порядка р неявной формулы Гира. Если на предшествующем (k—1)-м шаге использовалась формула порядка рk-1, то на следующем шаге выбор производился между формулами порядков рk-1—1, рk-1 или рk-1+1. Выбирается та формула, использование которой при заданной погрешности обеспечивает наибольшую величину шага hk. При этом порядок рk формул Гира не должен выходить за пределы диапазона [1,6].
Среди неявных методов интегрирования при p = const применяют методы Эйлера, трапеций, Шихмана. Их положительными особенностями являются А-устойчивость и сравнительно малый объем памяти, требующийся для хранения результатов интегрирования, полученных на предыдущих шагах. Однако метод Эйлера не обеспечивает необходимой точности при анализе переходных процессов в cлабодемпфированных системах. Метод трапеций в его первоначальном виде (8.37) имеет недостаток, заключающийся в появлении в численном решении ложной колебательной составляющей уже при сравнительно умеренных значениях шагов, поэтому метод трапеций удобен только при принятии мер, устраняющих ложные колебания. Значительное уменьшение ложных колебаний, но при несколько больших погрешностях, дает формула Шихмана.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
