

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Следует отметить, что формулы, аналогичные выражениям (8.52) и (8.50), можно вывести и для общего случая, когда происходит изменение шага h и порядка r формулы, если интерполяционный полином в уравнении (8.46) выразить через разделенные разности.
С учетом выражения (8.48), выбирая значения для р, q и r, получаем много других формул численного интегрирования. В частности, для линейных многошаговых методов в общем случав справедливо выражение
 (8.58)
(8.58)
которое соответствует как явным (b-1=0), так и неявным (b-1≠0) методам.
На базе уравнения (8.58) получена известная неявная формула Гира для жестких дифференциальных уравнений:
 (8.59)
(8.59)
из которой легко определяется аппроксимация для производной:
 (8.60)
(8.60)
коэффициенты которой в предположении, что вычисления ведутся с переменным шагом,

Ей сопутствует формула прогноза, аналогичная выражению (8.50) при использовании раздельных разностей,
![]() (8.61)
(8.61)
где
Неявный метод интегрирования с обратными разностями первого порядка Брайтона, или формула дифференцирования назад (ФДН) отличается от выражения (8.60) и (8.61) введением в соответствующие выражения обратной разности
∆xn-i= хn+1-i — xn-i, і = l, 2, ..., k.
При этом получаем:
![]() (8.62)
(8.62)
![]() (8.63)
(8.63)
где

Неявный метод численного интегрирования жестких систем дифференциальных уравнений, основанный на применении разностей высших порядков, предусматривает прогнозируемое значение вектора неизвестных математической модели консультируемой проблемы хп+1 определять с помощью интерполяционного полинома Ньютона для неравных промежутков:
![]() (8.64)
(8.64)
где

При этом для алгебраизации производной по времени используется формула
 (8.65)
(8.65)
где
 (8.66)
(8.66)
 (8.67)
(8.67)
— разделенные разности, вычисленные в предыдущий момент времени tn, откуда

Формулы (8.60), (8.62) и (8.65) могут использоваться для сведения дифференциально-алгебраической системы уравнений (8.1) к системе нелинейных алгебраических уравнений (8.2), соответствующей временной точке tn+1. При оценке начального значения искомого вектора неизвестных х(0)n+1 система нелинейных алгебраических уравнений решается методом Ньютона с использованием формул (8.61), (8.63) и (8.64).
Формулы (8.60), (8.62) и (8.65) эквивалентны друг другу, если их вывод проводить при одинаковых исходных предположениях (постоянном или переменном шаге h), и между их коэффициентами существует однозначная связь. Например, формула второго порядка
(k =2) для каждого из перечисленных методов приводится к виду, аналогичному формуле Шихмана:
 (8.68)
(8.68)
Об эквивалентности методов (8.60), (8.62) и (8.65) свидетельствует и их одинаковая численная устойчивость при k ≤ 6 (рис. 8.2, а и б).
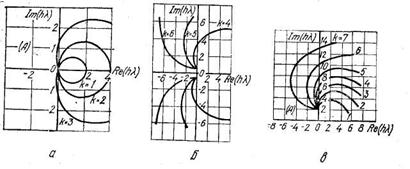
Рис. 8.2. Годографы устойчивости неявных многошаговых методов численного интегрирования Гира—Брайтона (а, б) и Энрайта (в); (А) — зона устойчивости
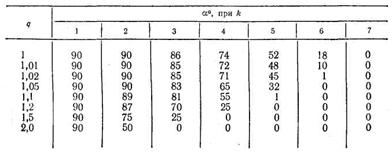
Известно, что при k≤2 эти методы обладают А-устойчивостью, т. е. область их абсолютной устойчивости включает всю левую полуплоскость Re(hλ)<0, где λ — собственные значения матрицы Якоби для правой части уравнения (8.45). Для k = 3, ..., 6 они, с одной стороны, А(α)-устойчивы, т. е. область их абсолютной устойчивости включает бесконечный клин |arg(—hλ)|<α, а с другой,— жестко устойчивы, так как область их абсолютной устойчивости ограничена частью левой полуплоскости, при этом в окрестности начала координат обеспечивается не только устойчивость, но и точность. В табл. 8.1 приведены значения α для формул различных порядков k≤6 при относительном изменении шага вычислений q = hj/hj-1.
Таблица 8.1
А(α)-устойчивость многошаговых неявных формул численного интегрирования
Среди часто используемых на практике методов вычисления приближения хп+1, кроме рассмотренных выше, следует отметить следующие.
1. Одношаговый А-устойчивый метод трапеций, для которого
 (8.69)
(8.69)
Для повышения точности вычислений рекомендуется этот метод использовать совместно со схемой экстраполяции
 (8.70)
(8.70)
где xn+1(h) и х2n+2(h/2) — решения, полученные по формуле (8.69) соответственно с шагом h и h/2 для каждой точки tn+1.
2. Многошаговый неявный метод Энрайта, в котором используется вторая производная,
![]() (8.71)
(8.71)
годографы устойчивости которого показаны на рис. 8.2, в для k≤7. При решении нелинейных задач для вычисления второй производной
![]() (8.72)
(8.72)
необходимо вычислять матрицы Якоби на каждой итерации и на каждом шаге, поэтому данный метод слишком трудоемкий. Он обладает большей точностью и устойчивостью, чем методы, выраженные уравнением (8.60), (8.62) и (8.65).
3. Композиционный многошаговый неявный метод Скила, соответствующий по смыслу методу Энрайта и представляющий собой комбинацию метода Гира — Брайтона, или ФДН, и метода Адамса — Мултона (8.51):
 (8.73)
(8.73)
где ![]() матрица Якоби для уравнения (8.45).
матрица Якоби для уравнения (8.45).
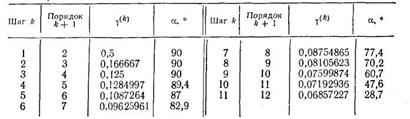
Выражение (8.73) имеет порядок k+1 для каждого шага вычислений k. Параметр γ(k) в уравнении (8.73) выбирают исходя из улучшения численной устойчивости метода, которая в данном случае охватывает методы до 12-го порядка включительно.
Данные о значениях γ(k) и параметре α для характеристики A(α) устойчивости сведены в табл. 8.2.
Таблица 8.2
A(α)-устойчивость композиционных методов неявного численного интегрирования
4. Блочные или циклические методы, основанные на идее одновременного вычисления «блока» приближения xn+1, xn+2, ..., хп+l. Блок просчитывается с постоянным шагом на выбранном интервале
tn = t0 + nh, где п = ml + j (j = 1,2,...,l и m= 0, 1, 2, ...), при этом сразу используется несколько независимых многошаговых методов:
 (8.74)
(8.74)
Например, при выборе исходных многошаговых методов третьего порядка (k = 3) получаем:

Следовательно, если блок приближений [xml-2, xml-1, хml]t известен, то по приведенным формулам определяется следующий блок
[xml+1, xml+2, хml+3]t, a затем процесс приближений повторяется.
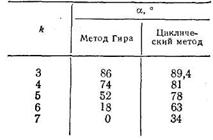
Неявные циклические методы характеризуются большей точностью и устойчивостью, чем методы, выраженные уравнениями (4.48), (4.50) и (4.53), что следует из табл. 8.3.
Таблица 8.3
А(α)-устойчивость циклических неявных методов численного интегрирования
Их целесообразно применять для моделирования консультируемых проблем, комплексные собственные значения моделей которых расположены вблизи мнимой оси плоскости hλ. Установлено, что эти методы жестко устойчивы при порядке k≤25.
Оценка локальной погрешности. Каждый из методов численного интегрирования характеризуется локальной погрешностью, или погрешностью на данном шаге вычислений. Для k-шагового метода, в котором приближение хп+1 к точным значениям x(tn+1) вычисляется через ранее вычисленные приближенные значения xn-k, хп— k +1, ..., хп—1, можно записать обобщенную формулу вычислений в виде
 (8.75)
(8.75)
Раскладывая функцию в уравнении (8.75) в ряд Тейлора в окрестности точки хп+1, получаем оценку для локальной погрешности дискретизации как оценку отсечения. Если метод имеет k-й порядок, то приближенно

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 |
